Основными
статическими параметрами являются пределы регулирования и статическая
погрешность регулирования. Пределы регулирования (±![]() ) определяют максимально возможное
изменение коэффициента передачи регулируемого объекта (например, усилителя с
корректором) на заданной частоте (обычно на КЧ) и зависят от параметров
регулируемого объекта, в частности типа регулирующего элемента, через который
осуществляется воздействие на объект. В качестве такого элемента во многих
устройствах АРУ используют терморезисторы косвенного подогрева, диапазон
изменения сопротивления которых влияет на пределы регулирования.
) определяют максимально возможное
изменение коэффициента передачи регулируемого объекта (например, усилителя с
корректором) на заданной частоте (обычно на КЧ) и зависят от параметров
регулируемого объекта, в частности типа регулирующего элемента, через который
осуществляется воздействие на объект. В качестве такого элемента во многих
устройствах АРУ используют терморезисторы косвенного подогрева, диапазон
изменения сопротивления которых влияет на пределы регулирования.
Статическая
погрешность регулирования (![]() ) определяет отклонение регулируемого
параметра (например, уровня сигнала КЧ на выходе усилителя) от номинального
значения после завершения процесса регулирования. С точки зрения статической
попогрешности устройства АРУ можно разделить на статические и астатические.
В первых статическая погрешность зависит от величины отклонения
регулируемого параметра на входе объекта регулирования от номинального или
установившегося значения, во вторых обеспечивается постоянство регулируемого
параметра на выходе регулируемого объекта независимо от величины отклонения
этого параметра на входе, т. е. в астатических системах
) определяет отклонение регулируемого
параметра (например, уровня сигнала КЧ на выходе усилителя) от номинального
значения после завершения процесса регулирования. С точки зрения статической
попогрешности устройства АРУ можно разделить на статические и астатические.
В первых статическая погрешность зависит от величины отклонения
регулируемого параметра на входе объекта регулирования от номинального или
установившегося значения, во вторых обеспечивается постоянство регулируемого
параметра на выходе регулируемого объекта независимо от величины отклонения
этого параметра на входе, т. е. в астатических системах
АРУ статическая погрешность регулирования постоянна и может быть близка к нулю.
Динамические
параметры устройства АРУ зависят от формы переходной характеристики процесса
регулирования, которая определяется реакцией системы на единичный скачок
возмущающего воздействия, например единичный скачок уровня сигнала КЧ (![]() ).К динамическим параметрам
относятся: время регули-
).К динамическим параметрам
относятся: время регули-
рования, скорость
регулирования и величина перерегулирования, Время регулирования (![]() ) определяет длительность
процесса регулирования от момента изменения регулируемого параметра (сигнала
КЧ) на входе устройства АРУ до момента, после которого отклонение регулируемого
параметра от установившегося значения не превосходит некоторой, наперед
заданной величины. Эта величина обычно принимается равной 0,05
) определяет длительность
процесса регулирования от момента изменения регулируемого параметра (сигнала
КЧ) на входе устройства АРУ до момента, после которого отклонение регулируемого
параметра от установившегося значения не превосходит некоторой, наперед
заданной величины. Эта величина обычно принимается равной 0,05 ![]() .
.
Различают среднюю,
начальную и максимальную скорости регулирования. Средняя скорость ![]() -это скорость изменения уровня
сигнала КЧ, которая должна быть достаточной для того, чтобы изменение усиления
ЛУс успевало за изменением затухания регулируемого участка тракта. Начальная
скорость
-это скорость изменения уровня
сигнала КЧ, которая должна быть достаточной для того, чтобы изменение усиления
ЛУс успевало за изменением затухания регулируемого участка тракта. Начальная
скорость ![]() определяется крутизной переходной
характеристики в начальной точке, а максимальная
определяется крутизной переходной
характеристики в начальной точке, а максимальная ![]() максимальной
крутизной этой характеристики. Максимальная скорость регулирования не должна
быть слишком высокой, в противном случае изменение затухания тракта в процессе
регулирования будет восприниматься как мультипликативная помеха (обычно
максимальной
крутизной этой характеристики. Максимальная скорость регулирования не должна
быть слишком высокой, в противном случае изменение затухания тракта в процессе
регулирования будет восприниматься как мультипликативная помеха (обычно ![]() 1 дБ/с). При выборе параметров АРУ
стремятся обеспечить постоянную скорость регулирования, т. е.
1 дБ/с). При выборе параметров АРУ
стремятся обеспечить постоянную скорость регулирования, т. е. ![]() =
=![]() =
=![]() , или скорость, уменьшающуюся с
течением времени, т. е.
, или скорость, уменьшающуюся с
течением времени, т. е. ![]() <
<![]() =
=![]() .
.
Величина
перерегулирования (![]() ) представляет собой
максимальное отклонение регулируемого параметра
) представляет собой
максимальное отклонение регулируемого параметра ![]() от
установившегося значения в процессе регулирования относительно первоначального
скачка уровня:
от
установившегося значения в процессе регулирования относительно первоначального
скачка уровня:
![]()
На рис. 4.45 приведены
переходные характеристики процесса регулирования двух типов - колебательная
(кривая 1) и апериодическая (кривая 2). На этих графиках показаны
статическая погрешность регулирования ![]() время
регулирования
время
регулирования ![]() и величина
и величина ![]() . Очевидно, что перерегулирование
имеет место только при
. Очевидно, что перерегулирование
имеет место только при![]()
![]() переходной
характеристике колебательного характера. По нормам величина перерегулирования
переходной
характеристике колебательного характера. По нормам величина перерегулирования ![]() должна быть меньше единицы, т. е.
амплитуда переходного процесса не должна превышать вызывающего его возмущения.
должна быть меньше единицы, т. е.
амплитуда переходного процесса не должна превышать вызывающего его возмущения.
![]()
![]()
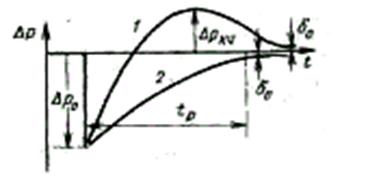
Рис. 4.45. Переходные характеристики процесса регулирования
Одиночное устройство АРУ по КЧ
Одиночное устройство АРУ
по КЧ представляет собой замкнутую систему, свойство которой определяется
передаточной![]() функцией по возмущающему воздействию.
В качестве последнего можно рассматривать отклонение уровня сигнала КЧ от
номинального или установившегося значения. В схеме на рис. 4.43 в установившемся
режиме
функцией по возмущающему воздействию.
В качестве последнего можно рассматривать отклонение уровня сигнала КЧ от
номинального или установившегося значения. В схеме на рис. 4.43 в установившемся
режиме
Uкч вых0 = U кч вх0 K ро (4.52)
где Uкч вых0 и U кч вх0 - номинальные значения выходного и входного напряжений сигналов КЧ; K ро - коэффициент передачиPO.
При отклонении входного напряжения КЧ на ΔU кч вхвыходное напряжение также изменится. Тогда
![]() (4.53)
(4.53)
где ![]() -передаточная функция разомкнутой
петли OC, характеризующая переходный процесс в системе
авторегулирования S-комплексная
частота. Знак минус в правой части выражения (4.53) указывает на то, что ОС
должна быть отрицательной для обеспечения эффекта уменьшения возмущения на
выходе системы.
-передаточная функция разомкнутой
петли OC, характеризующая переходный процесс в системе
авторегулирования S-комплексная
частота. Знак минус в правой части выражения (4.53) указывает на то, что ОС
должна быть отрицательной для обеспечения эффекта уменьшения возмущения на
выходе системы.
Вычитая почленно (4.52) из (4.53) и рассматривая относительные приращения сигналов КЧ на входе и выходе системы АРУ, получаем
 .
.
При малых относительных изменениях напряжений сигналов КЧ их можно заменить приращениями уровней этих сигналов. Тогда передаточная функция устройстваАРУ может быть записана в виде
![]() (4.54)
(4.54)
Таким образом, динамические параметры и статическая погрешность регулирования системы АРУ определяются передаточной функцией разомкнутой петли ОС, которая равна произведению передаточных функций звеньев, входящих в состав устройства АРУ. В соответствии со схемой на рис. 4.43 такими звеньями отображаются ЧЭ (ПКК) регулятор, который можно представить со стоящим из собственно регулятора и схемы сравнения, и РО (в на правлении от точек подключения РЭ к выходу РО).
В теории автоматического регулирования различают пропорциональные (безынерционные) инерционны, интегрирующие и дифференцирующие элементарные звенья. Приемник контрольного канала (ЧЗ) должен, строго говоря, отображаться инерциионным звеном достаточно высокого порядка за счет входящего в его состав узкополосного, обычно кварцевого, фильтра КЧ. Однако постоянные времени ПКК значительно меньше времени отработки системой АРУ возмущений на ее входе. Потому ПКК можно рассматривать как пропорциональное элементарное звено, передаточная функция которого
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.