С подвижной системой МРУ жестко связана ось, на которой укреплены роторные пластины переменного конденсатора - датчика емкости, включенного в цепь подогрева терморезистора. Перемещение роторных пластин изменяет ток подогрева и в конечном счете усиление Лус. Ток чувствительности рассмотренного МРУ составляет 60 мкА. Время перемещения подвижной части из одного крайнего положения в другое при токе 80 мкА составляет 35... 120 мин.
Для блокировки АРУ в этом МРУ также используется электромагнитный фиксатор. В МРУ обоих типов двигатель одновременно выполняет роль схемы сравнения, что упрощает устройство АРУ в целом.
Очень перспективным интегрирующим элементом регулятора, не содержащим механически перемещающихся узлов, является мемистор, действие которого основано на процессе электролиза.
Принцип действия мемистора поясняет схема, приведенная на рис. 4.50. В герметизированном корпусе 1, заполненном электролитом (медным купоросом или раствором хлористого серебра) помещены два электрода - управляющий 2 (соответственно из меди или серебра) и резистивный 3 (электрод считывания), который изготовляется из химически инертного металла (обычно из платины) и покрыт слоем того же металла, что и управляющий электрод. Разностное напряжение (Uкл-Uэт) с выхода схемы сравнения прикладывается между управляющим электродом и электродом считывания. Под действием этого напряжения возникает упорядоченное движение ионов - положительных к электроду с отрицательным потенциалом (катоду), а отрицательных - к электроду с положительным потенциалом (аноду). В результате металл, содержащийся в электролите (медь или серебро) осаждается на катоде, а металл, осажденный на аноде, растворяется. При изменении полярности разностного напряжения анод и катод меняются местами.
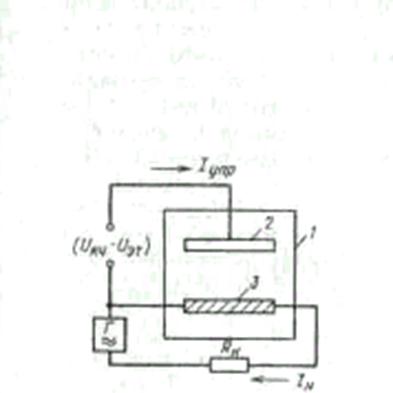
Рис. 4.50. Регулятор с мемистором
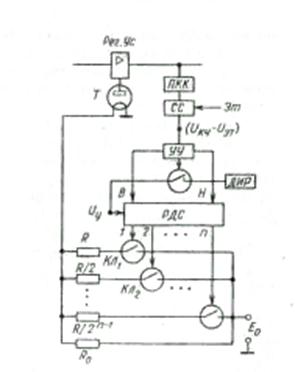
Рис. 4.51 Электронный регулятор
В результате электролиза изменяется сопротивление электрода считывания, а следовательно, и ток в цепи нагрузки, создаваемый вспомогательным генератором. Этот ток может использоваться для подогрева терморезистора в схеме ПАК.
Регулируемым элементом ПАК может служить непосредственно изменяющееся сопротивление электрода считывания. В этом случае мемистор выполняет одновременно функции регулятора и регулирующего элемента.
Мемисторы обладают высокой чувствительностью (ток, при котором начинает изменяться сопротивление резистивного электрода, Iупр< мА), инерционностью высокой надежностью, малыми размерами и экономичностью. К недостаткам этих интегрирующих элементов можно отнести температурную зависимость их параметров и наличие сравнительно большой собственной емкости между выводами электрода считывания, что может затруднить его использование в качестве регулируемого элемента ПАК.
Реализация ИЗ, обладающих памятью, сравнительно просто осуществляется в дискретных регуляторах, в которых сигналы, циркулирующие по петле регулирования, имеют дискретный характер. Дискретные регуляторы выполняются на реверсивных двоичных счетчиках (электронный регулятор) или на трансфлюксорах. Рассмотрим принцип работы электронного регулятора, который иллюстрируется схемой на рис. 4.51.
Схема содержит управляющее устройство УУ, которое реагирует на величину и знак разностного напряжения (Uкч-Uэт), формируемого на выходе схемы сравнения (СС), и датчик импульсов регулирования (ДИР)- генератор прямоугольных импульсов, поступающих на реверсивный двоичный счетчик (РДС). Последний имеет прямой и обратный ходы, которые выбираются управляющими сигналами В ("Вперед") и Н ("Назад") поступающими на РДС из УУ. Выходы счетчика через ключи Кл1, Кл2,... подключают через элементы резистивной матрицы к подогревателю терморезистора (Т) источник тока подогрева Ео. Когда счетчик "обнулен", т.е. на его выходах напряжение отсутствует , ключи КЛ1, Кл2…. разомкнуты и через подогреватель протекает ток I= Ео/Roсопротивлением подогревателя по сравнению с сопротивлением элементов матрицы можно пренебречь. Это состояние счетчика соответствует минимальному усилению регулируемого усилителя (Рег.Ус.).
При Uкч<Uэт управляющее устройство подключает ко входу РДС датчик импульсов и подает на счетчик сигнал В. После поступления на вход РДС первого импульса от ДИР на выходе 1-го разряда счетчика появится логическая 1, которая отключит Кл1. При этом ток подогрева терморезистора увеличится на DI=Eo/R, сопротивление рабочего тела уменьшится, усиление регулируемого усилителя возрастет и разностное напряжение (Uэт-Uкч) на выходе СС уменьшится. После поступления второго импульса ток подогрева увеличится на величину 2DI, так как откроется Кл^ с сопротивлением резистивной матрицы R/2. Этот процесс будет продолжаться до тех пор, пока (Uэт-Uкч) не станет равным нулю. Тогда УУ отключит ДИР и регулировка прекратится.
В случае, когда Uкч>Uэт, УУ подает на РДС сигнал 14, который включает обратный ход счетчика, и ток подогрева терморезистора начнет уменьшаться ступенями, равными DI.
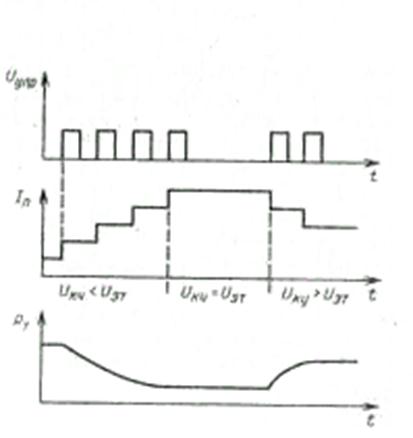
Рис. 4.52. Изменение тока подогрева Iп и сопротивления рабочего тела термистора Rт во времени от управляющего напряжения Uупр
Изменение тока подогрева Iп, и сопротивления рабочего тела Rт терморезистора показано на рис. 4.52. Число ступеней изменения тока подогрева при изменении усиления от минимального до максимального значения равно 2n., где п- число разрядов двоичного счетчика. При п = 8 и пределах регулирования ±10 дБ изменение усиления на каждой ступени составит 20/28 = 0,08 дБ. При этом обеспечивается практически плавное изменение усиления.
Период следования импульсов от ДИР определяет скорость регулирования. Этот период должен быть в несколько раз больше постоянной времени терморезистора. Двоичный счетчик является элементом памяти, который сохраняет состояние регулятора при отключении датчика импульсов от входа РДС (при Uкч=Uэт или при пропадании сигнала КЧ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.