Построение одиночного устройства АРУ по току КЧ показано на рис. 4.43. Сигнал КЧ на выходе ЛУс с уровнем рКЧ вых выделяяется узкополосным фильтром (ФКЧ), усиливается усилителем контрольной частоты (УКЧ), выпрямляется в детекторе (Д) и подается на вход схемы сравнения (СС).
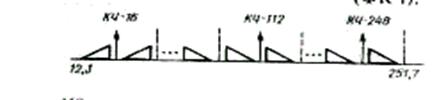
Рис.4.42.рапзмещение контрольных частот в линейном спектре системы передачи К-60П
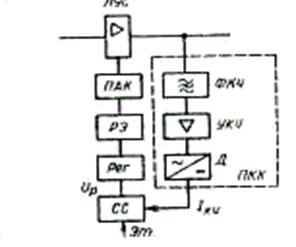
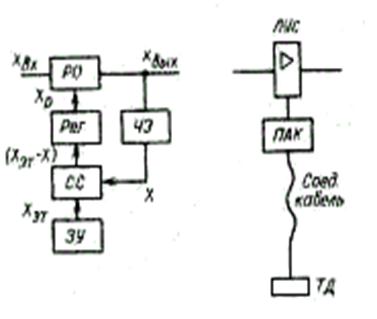
Рис. 4.43. Построение оди- Рис. 4.44. Принцип работы АРУпо
ночного устройства АРУ по температуре грунта
КЧ
Выпрямленный токКЧ в СС сравнивается с эталоном, и качестве которого могут использоваться напряжение, ток, сила упругости пружины, сила тяжес-
ти . Очевидно, что в СС выпрямленный токКЧ должен преобразовываться в величину, имеющую ту же физическую природу, что и эталонный сигнал.
Если уроиснь рКЧ вх равеи номинальному значению, уровень рКЧ вых
также будет номинальным и ток IКЧ будет соответствовать эталону. На выходе СС сигнал ошибки отсутствует, и регулирование усиления ЛУс не происходит. При уменьшении уровня рКЧ вх по какой-либо причине уменьшаются рКЧ вых и IКЧ. Выпрямленный ток КЧ не будет соответствовать эталону, на выходе СС появля-
ется сигнал ошибки Up который воздействует на регулируемый элемент (РЭ) ПАК, изменяя затухание последнего. Переменный АК увеличивает усиление ЛУс до тех пор, пока уровень рКЧ вых вновь не станет номинальным, сигнал ошибки на выходе СС исчезнет и регулирование прекратится. Аналогично работает схема АРУ при увеличении рКЧ вх. Таким образом, устройство АРУ не-
прерывно контролирует и автоматически компенсирует все отклонения тока КЧ от номинального значения.
С точки зрения теории автоматического регулирования рассмотренная схема относится к устройствам автоматической стабилизации. Приемник контрольного канала выполняет роль чувствительного элемента (ЧЭ), который усиливает и преобразует регулируемую величину хвых (сигнал КЧ) в сигнал Х, имеющий ту
же физическую природу, что и эталонный сигнал ХЭТ ,формируемый задающим устройством (3У). На выходе СС образуется разностный сигнал (ХЭТ –Х) ,который поступает на регулирующее устройство или собственно регулятор. Регулятор определяет закон регулирования, в соответствии с которым формируемыи на его выходе сигнал Хр воздействует на регулируемый объект (РО).
В схеме на рис. 4.43 регулируемым объектом является ЛУс с ПАК, включенном в цепи ОС усилителя или на его входе. Если закон регулирования таков, что выходной сигнал рсгулятора пропорционален сигналу ошибки на выходе СС регулятор называется пропорциональным (П-регулятор), а устройство АРУ - устройством с П-регулированием. Если в соответствии с законом регулирования между Хр и (ХЭТ –Х) нет однозначного соответствия, в частности выходной сигнал регулятора пропорционален интегралу от величины отклонения на его входе, регулятор называется интегральным (И-регулятор), а устройство АРУ – устройством с И-регулированием.
Следует отметить, что в реальных системах АРУ некоторые из перечисленных функциональных узлов могут отсутствовать, а иногда трудно провести их четкое разграничение, если, например, они объединены в одном устройстве. Так, в ряде систем АРУ объединены СС, ЗУ и собственно регулятор.
Помимо устройств автоматической стабилизации могут при меняться схемы АРУ, представляющие собой следящие системы. Примером следящей системы может служить АРУ по температуре грунта, широко применяемая в системах передачи по кабелям. В таких системах основной причиной изменения затухания групповых и линейного трактов являются изменения температуры грунта на глубине прокладки кабеля. На этой глубине в грунт помещается термодатчик (ТД), который связан с усилителем соединительным кабелем и является управляющим элементом ПАК (рис. 4.44).
Между затуханием магистрального кабеля и температурой грунта имеется однозначное соответствие. Изменение температуры грунта приводит к изменению сопротивления термодатчика и соответствующему изменению затухания ПАК, а следовательно, к изменению усиления ЛУс. Таким образом, система АРУ рассмотренного типа следит за температурой грунта и компенсирует
температурные изменения затухания кабеля, осуществляя косвенное регулирование. При большой длине соединительного кабеля его емкость шунтирует сопротивление термодатчика, нарушая работу ПАК и процесс регулирования уровня. Для устранения этого влияния в устройство АРУ по температуре грунта вводят схему автоматической стабилизации, в которой термодатчик не связан непосредственно с ПАК. Управляющим сопротивлением ПАК в этом случае служит терморезистор косвенного подогрева, который так же, как и термодатчик, является элементом самобалансируюшейся мостовой схемы. При этом через термодатчик протекает ток низкой частоты, на которой шунтирующее
действие емкости соединительного кабеля не сказывается.
Следящие системы АРУ не имеют замкнутой петли авторегулирования, и поэтому точность регулирования в таких системах существенно ниже, чем в системах АРУ по КЧ, поскольку на нее влияют неравномерный прогрев грунта на разных участках трассы прокладки кабеля, старение термодатчика и элементов корректора и т.п. На практике такие системы используют только совместно с устройствами АРУ по КЧ, которые помимо своих основных функций устраняют погрешности коррекции, возникающие при работе косвенных систем АРУ.
Параметры устройств АРУ
Для оценки и сравнения качественных показателей различных систем АРУ используется ряд параметров, которые можно разделить на статические и динамические. Первые характеризуют свойства системы в установившемся режиме, при котором отсутствуют переходные процессы, а вторые - процессы регулирования, протекающие в устройствах АРУ с момента возникновения возмущающего воздействия до момента, при котором процесс регулирования можно считать законченным. В соответствии со значениями статических и динамических параметров осуществляется классификация систем АРУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.