1 Постановка задачи.
Полагаем, что заданы основные проектные параметры манипулятора lc, lp и параметры, характеризующие его компоновку h0, φ0, ψ0, φкон, ψкон. Требуется определить координаты подвеса гидроцилиндров, заданных значениями минимальной и максимальной (с вытянутым штоком) длины, обеспечивающие при полном использовании рабочего хода штока угловые перемещения стрелы и рукояти в заданных диапазонах углов φ и ψ. В данном случае на координаты точек подвеса гидроцилиндров никаких ограничений не наложено. В действительности точки подвеса должны располагаться в непосредственной. близости от наружной поверхности колонны, стрелы, рукояти.
Будем исходить из естественных требований, вытекающих из конструирования узлов крепления: узлы в виде проушин привариваются к наружным поверхностям указанных элементов манипулятора. При этом ограничения носят скользящий характер: положение точек подвеса отыскивается на отрезках прямых, параллельных осям звеньев манипулятора.
Поскольку выбор точек подвеса гидроцилиндров стрелы и рукояти удобно вести в различных системах отсчета, то рассмотрим последовательно эти две задачи.
Для стрелы начало неподвижной системы координат поместим в точке О (рисунок 1). Определим координаты точки подвеса гидроцилиндра стрелы в принятой системе координат:
Координаты точек подвеса гидроцилиндра должны удовлетворять условиям:
![]()
![]() .
.
Имея это в виду, запишем следующие явные функциональные зависимости:
 (4.1)
(4.1)
В конкретном случае, когда величины f и d известны, задача оказывается замкнутой – две неизвестные величины а и к связаны двумя линейно независимыми уравнениями. Для решения системы уравнений (4.1) установим явную функциональную связь между искомыми параметрами а и к. Возводя левые и правые части равенств (4.1) в квадрат и вычитая из второго первое, получим:
 .(4.2)
.(4.2)
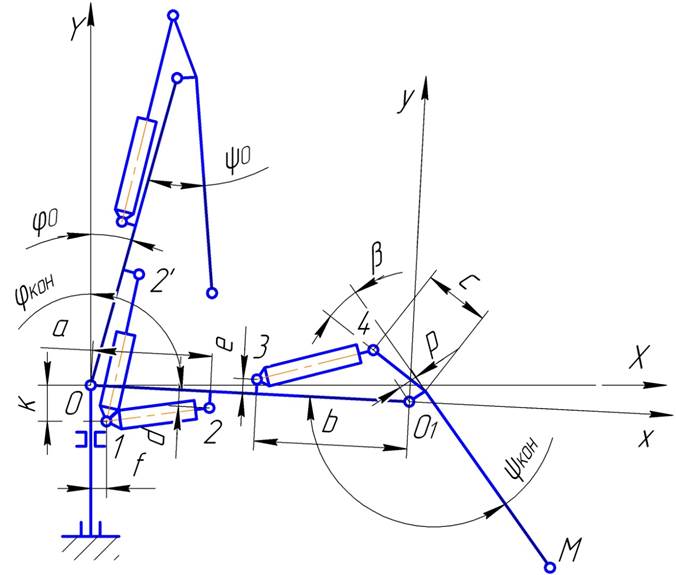
Рисунок 4.1 – Расчетная схема манипулятора для определения точек подвеса гидроцилиндров привода
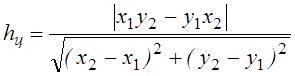
При наличии связи (4.2) алгоритм поиска решения сводится к следующему: задавая ряд значений параметра к, вычисляем по формуле (4.2) а(к), и, например, по второму уравнению (4.1) - Lmах(к). То значение к, при котором строго выполняется второе равенство (4.1), и определяет искомое решение.
До сих пор предполагалось, что гидроцилиндр характеризуется величинами Lmin и Lmax. Рассмотрим теперь более общую задачу. Пусть существует некоторый ряд гидроцилиндров, отличающихся ходом штока l и длиной L при полностью втянутом штоке, т.е. имеем совокупность
l1, L1; l2, L2; ln, Ln. (4.3)
Среди совокупности гидроцилиндров (4.3) требуется выбрать такой, при котором обеспечивается максимальная грузоподъемность при полном вылете манипулятора. Поскольку максимальной грузоподъемности соответствует максимальное плечо усилия на штоке гидроцилиндра, то критериальную функцию запишем как [7]:
 , или в развернутом виде
, или в развернутом виде
 , где аi, кi – параметры подвески гидроцилиндра из
ряда li, Li, определяемые уравнениями (4.1). При
этом стратегию пояска оптимального решения представил следующим образом:
, где аi, кi – параметры подвески гидроцилиндра из
ряда li, Li, определяемые уравнениями (4.1). При
этом стратегию пояска оптимального решения представил следующим образом:
 , (4.4)
, (4.4)

Решение (4) описывает оптимальную компоновку гидроцилиндров управления стрелой, выбранных из ряда (3) по условию максимальной грузоподъемности. Аналогично решается задача выбора гидроцилиндров управления рукоятью.
Определим координаты точек 3, 4 в системе координат О1ху (ось 01х направлена вдоль стрелы – рисунок 4.1):
![]() ,
,
 (4.5)
(4.5)
где β - угол между рычагом и продольной осью рукояти. Стратегия поиска оптимального решения:

![]()
![]() [4.6,
4.7]
[4.6,
4.7]
Для решения системы уравнений (4.6, 4.7) установим явную функциональную связь между искомыми параметрами b и c. Возводя левые и правые части равенств (4.6, 4.7) в квадрат и вычитая из второго первое, получим выражение :
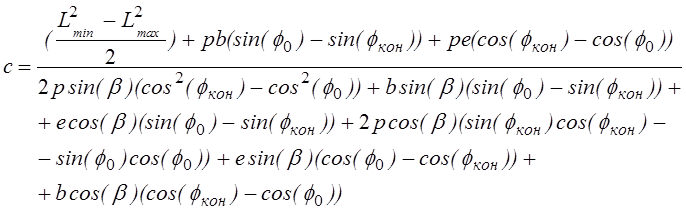 (4.8).
(4.8).
По отраслевому стандарту ОСТ22-1417-89 выбираем гидроцилиндры.
Рассмотрим пример выбора гидроцилиндра стрелы из ряда, представленного ниже.
Таблица 4.1 – Ряд гидроцилиндров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.