Θ0 – начальный угол наклона дерева к вертикали.
Откуда
![]() ; (1.12)
; (1.12)
4 Определение сил взаимодействия захватно – срезающего устройства с падающим деревом.
Силы взаимодействия захватно – срезающего устройства с падающим деревом – в точке М определяются на основании следующих расчетных формул:
 ; (1.13)
; (1.13)
где ![]() - ускорение точки М вдоль оси х,
- ускорение точки М вдоль оси х,
![]() -
ускорение точки М вдоль оси z.
-
ускорение точки М вдоль оси z.
Учитывая тот факт, что ускорение точки М считаем равным нулю – уравнения приобретут следующий вид:
 ; (1.14)
; (1.14)
Используя формулы 2.14 найти величины сил взаимодействия ЗСУ с падающим деревом и построить их зависимости от угла Θ.
В результате получаем нагруженность манипулятора в процессе валки и перемещения дерева.
Контрольные вопросы для самоподготовки:
1 Назвать факторы, влияющие на скорость падения дерева.
2 Назвать факторы, влияющие на время падения дерева.
3 Объяснить для чего производится определение сил взаимодействия манипулятора с деревом при валке и пакетировании.
4 Пояснить влияние принимаемых в расчетах допущений на результат.
4 часа
Определение сил сопротивления перемещению дерева и параметров приводов рычагов захватных устройств.
Цель работы: расчет сил сопротивления перемещению дереваи параметров приводов рычагов захватов. Расчет прочности элементов конструкциии захватов.
Задачи работы: приобретение практических навыков в определении основных параметров захватных устройств.
Обеспечивающие средства: методика определения сил сопротивления и параметров приводов рычагов захватов.
Задание: на основании исходных данных определить усилия, действующие в захватном устройстве (ЗУ) при подъёме и подтаскивании дерева с последующим подбором геометрических сечений рычагов ЗУ.
Требования к содержанию отчета: по результатам работы оформляется отчет в соответствии с порядком выполнения работы.
Порядок выполнения:
1 Определение сил взаимодействия между деревом и захватным устройством в процессе работы машины.
Необходимые характеристики деревьев [5].
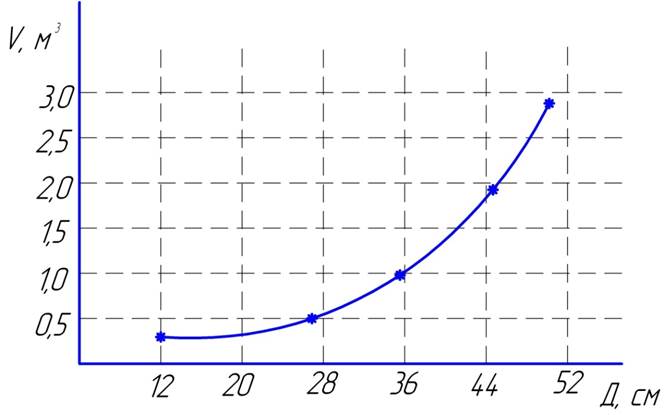
Рисунок 2.1 – Зависимость между объёмом хлыста и его диаметром
Таблица 2.1 - Плотность заготавливаемой древесины
|
ρ, кг/м3 |
720 |
800 |
755 |
930 |
|
порода |
ель |
сосна |
осина |
береза |
На основании данных рисунка 2.1 и таблицы 2.1 можно определить массу ствола дерева по следующему выражению:
![]() ;
(2.1)
;
(2.1)
Силы взаимодействия между захватом и деревом (хлыстом) при подъёме и подтаскивании его к кониково – зажимному устройству по горизонтальному участку в установившемся режиме (угол наклона местности α=0, ускорение j=0).
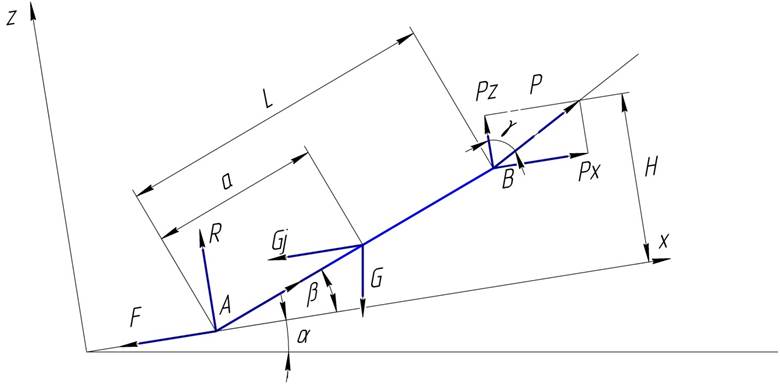
Рисунок 2.2 - Расчетная схема
На основании рисунка 2 с учетом преобразования выражения для определения сил Pz и Px имеют следующий вид:
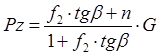 ; (2.2)
; (2.2)
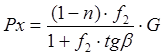 ; (2.3)
; (2.3)
где f2 – коэффициент сопротивления волочению дерева по грунту, зависит от состояния волока, типа грунта и т.д. Средние значения при волочении деревьев или хлыстов по волоку: летом 0,4-0,6; по мокрой поверхности 0,6-0,8; зимой 0,3-0,5; по рыхлому снегу 0,5-0,7.
n – коэффициент распределения силы тяжести дерева (хлыста)
при подтаскивании за вершину n ≈ 0,3; при подтаскивании за комель n ≈ 0,5-0,6;
G – сила тяжести хлыста.
2 Определение наиболее опасного случая нагружения захватного устройства.
На основании опыта проектирования установлено, что один из случаев наиболее опасного нагружения захватного устройства (ЗУ): подъём за один конец дерева максимального объёма; одновременно дерево перемещается в кониковое зажимное устройство манипулятора на вылете, при котором плечо усилия на штоке гидроцилиндра привода рукояти является максимальным.
3 Составление расчетных схем и определение нагрузок, действующих на рычаг захватного устройства.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.