Пусть стрела поворачивается
вокруг шарнира О с угловой скоростью ![]() ,
а рукоять поворачивается вокруг точки О1 с той же скоростью, но в
обратном направлении. Тогда получим пару вращения, и любая точка рукояти будет
двигаться поступательно с максимальной скоростью стрелы:
,
а рукоять поворачивается вокруг точки О1 с той же скоростью, но в
обратном направлении. Тогда получим пару вращения, и любая точка рукояти будет
двигаться поступательно с максимальной скоростью стрелы:
![]() , (1.1)
, (1.1)
где l1 – длина стрелы,
![]() -
угловая скорость вращения стрелы.
-
угловая скорость вращения стрелы.
В данном случае точка М будет двигаться по некоторой кривой малой кривизны и с высокой степенью точности ускорение точки М можно считать равным нулю. Тогда уравнение вращения дерева будет иметь вид такой же, что и при вращении относительно неподвижной оси:
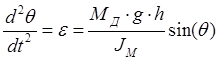 ; (1.2)
; (1.2)
где МД – масса дерева,
g – ускорение свободного падения,
h – расстояние от торца комля до центра тяжести дерева.
JM – момент инерции дерева относительно точки М.
Θ – угол между продольной осью дерева и вертикалью при падении .
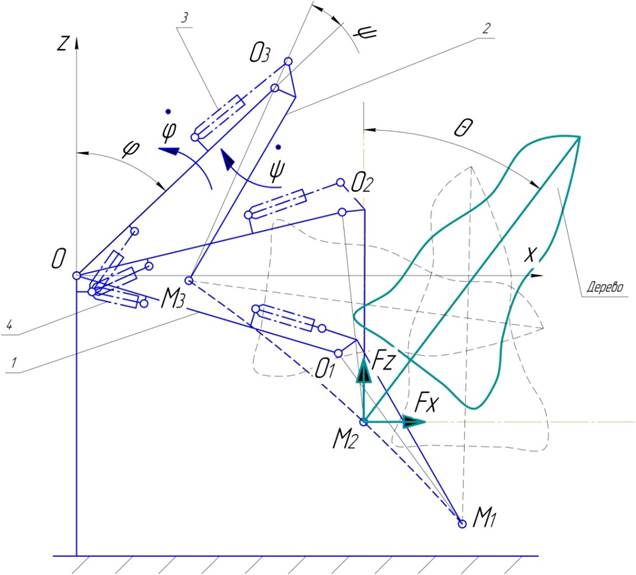
Рисунок 1.1 – Схема взаимодействия манипулятора с деревом
1 – стрела, 2 – рукоять, 3 – гидроцилиндр поворота рукояти,
4 – гидроцилиндр подъёма стрелы
После интегрирования уравнения вращения дерева получим выражение для угловой скорости вращения дерева при падении:
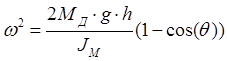 ; (1.3)
; (1.3)
2 Определение массовых характеристик дерева.
Массу дерева можно достаточно точно определить по следующим эмпирическим формулам [5], где d – диаметр дерева на высоте груди в см. :
- для сосны ![]() ,
,
- для ели ![]() ,
,
- для осины ![]() ,
,
- для березы в зимний период ![]() ,
,
»» в летний
период ![]() .
.
Положение центра тяжести дерева можно определить на основе многочисленных теоретических и экспериментальных исследований, в результате которых установлено, что центр тяжести дерева располагается на высоте (0,36 – 0,40)Н, где Н – высота дерева. [3,4]. Таким образом:
![]() . (1.4)
. (1.4)
Момент инерции дерева относительно комля – Jо определяется по формуле [2]:
Jо = 0,21 mh2д; (1.5)
3 Построение траектории движения точки М – рисунок 1.1.
По условию поступательного равномерного движения рукояти имеем:
![]() , (1.7)
, (1.7)
![]() ,
,
![]()
![]()
Траектория представляется следующим уравнением:
 . (1.8)
. (1.8)
где l2 – длина рукояти.
В начальный момент времени имеем:
 ; (1.9)
; (1.9)
Решая уравнения относительно
неизвестных а и ![]() ,
находим угловые величины в момент срезания дерева
,
находим угловые величины в момент срезания дерева ![]() и
и
![]() .
.
![]() -
начальный угол между стрелой и рукоятью, а
-
начальный угол между стрелой и рукоятью, а ![]() -
начальный угол между стрелой и осью Z в момент срезания дерева.
-
начальный угол между стрелой и осью Z в момент срезания дерева.
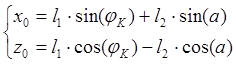
В качестве начальных условий
принимаются координаты Х0,
Z0 расположения
захватно - срезающего устройства в момент среза дерева точка М. (Приведены в
исходных данных). Решение системы уравнений производим в программе MathCAD в соответствии с приведённым ниже примером решения
такой системы, где х и у равные 0 необходимы в качестве начальных
условий для алгоритма решения подобных уравнений, а х и у
входящие в уравнение являются искомыми значениями соответственно углов ![]() и
и
![]() в
радианах:
в
радианах:
Пример решения системы уравнений в программе MathCAD:
X0 = 6 м, Z0 = 3 м. Начальные условия по исходным данным.
|
|
|
|
|
|
|
|
|
|
|
|
Команда, запускающая решение.
Начальные условия для алгоритма решения.
Решаемая система
Функция поиска решения.
Здесь х
это ![]() =
0,531 рад, а у – а = 1,458 рад
=
0,531 рад, а у – а = 1,458 рад
После нахождения искомых величин необходимо построить траекторию движения точки М произвольно задаваясь временем t = 0; 1; 2; 3; и т.д. до 10 секунд по следующим зависимостям:
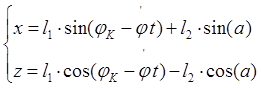 ;
(1.10)
;
(1.10)
Построение траектории произвести в координатах z и x. Далее на траектории необходимо отметить время, которому принадлежит каждая построенная точка. Зная время вычислить угол Θ на основании зависимости его от времени, имеющей следующий вид:
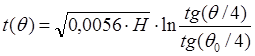 ; (1.11)
; (1.11)
где Н – высота срезаемого дерева,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.