5 Перечислить факторы, влияющие на величину усилия на штоке гидроцилиндра привода захвата.
4 часа
Построение рабочей зоны манипулятора
Цель работы: разработать кинематическую схему и построить рабочую зону манипулятора.
Задачи работы: приобретение практических навыков в разработке принципиальной кинематической схемы и определении рабочей зоны манипулятора.
Обеспечивающие средства: методика проектирования манипуляторов лесных машин.
Задание: на основании исходных данных разработать кинематическую схему и построить рабочую зону манипулятора.
Требования к содержанию отчета: по результатам работы оформляется отчет в соответствии с порядком выполнения работы. В конце отчета на формате А4 представить кинематическую схему разработанного манипулятора.
Порядок выполнения:
1 Расчет основных проектных параметров манипулятора
Манипулятор как объект проектирования характеризуется следующими параметрами (рисунок 1): L - максимальным и l- минимальным вылетом; lc, lр - длиной стрелы и рукояти; l1 - длиyой телескопического звена (еcли такое звено имеется); φ0, ψ0 – углами ориентации стрелы и рукояти при положении рабочего органа над коником машины.
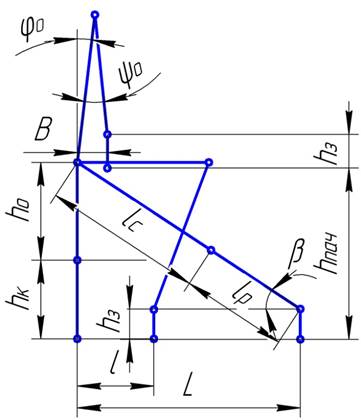
Рисунок 3.1 – Расчетная схема для определения проектных параметров манипулятора
Кроме того, компоновка манипулятора на лесной машине, например на валочно-трелевочной или трелевочной, определяется высотой рабочего органа hз, высотой платформы hк, на которой устанавливается поворотная колонна и кониково – зажимное устройство, максимальной высотой формируемой пачки деревьев hпач, расстоянием B от оси шарнира сочленения стрелы c колонной до вертикальной плоскости коника, высотой поворотной колонны h0.
Полагаем, что задан максимальный вылет манипулятора L, высота технологической платформы hк объём пачки деревьев (хлыстов) Vпач, средний диаметр деревьев Dср. Наложены ограничения на минимальную высоту расположения шарнира сочленения стрелы с колонной над уровнем платформы h0 и минимальное расстояние от оси шарнира до вертикальной плоскости кониково-зажимного устройства.
Требуется среди множества решений, различающихся параметрами lc, lр, φ0, ψ0, выбрать такую их совокупность, для которой имеет место наименьшая суммарная длина стрелы и рукояти при условии h0 ≥ hдоп, В ≥ Вдоп.
Решение этой задачи в какой-то мере отвечает требованиям минимизации металлоемкости конструкции манипулятора. Естественно, что оптимизация параметров по металлоемкости должна вестись с учетом нагрузок и работы конструкции на прочность. Поставленную задачу можно отнести к оптимизации компоновки манипулятора [7]. Для ее решения составим уравнение длин в проекциях на ось поворотной колонны:
![]() (3.1)
(3.1)
Высота рабочего органа hз в данном случае исключается из рассмотрения, поскольку она входит в левую и правую части уравнения. Максимальная высота пачки определяется как сумма
![]() , где dпач – диаметр пачки деревьев.
, где dпач – диаметр пачки деревьев.
Диаметр пачки в плоскости коника зависит от её объема.Vпач, и объема дерева Vд. Зная объем пачки и объем одного дерева со средним диаметром Dср находим число деревьев
 ,
,
Далее описываем совокупность n соприкасающихся окружностей диаметром Dср окружностью, которая и характеризует искомый диаметр пачки dпач.
Для определения относительного диаметра пачки в зависимости от числа деревьев можно воспользоваться следующими данными:
Таблица 3.1 – Данные для определения относительного диаметра пачки
|
n |
3 |
4 |
7 |
19 |
|
|
2,14 |
2,4 |
3 |
5 |
Кроме уравнения (3.1) также налагаются два условия (рисунок 3.1).
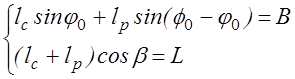 (3.2)
(3.2)
Последнее равенство справедливо в том случае, когда стрела и рукоять составляют одну линию (практически это не всегда удается сделать из-за конструктивных ограничений). Однако равенство (3.2) выполняется с достаточно высокой точностью, если между стрелой и рукоятью в разложенном положении имеется угол ψ порядка 150° (ошибка не превосходит 5%) [7].
Выразим sinβ через cosβ с учетом равенства (3.2):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
