![]() ,
,
![]() м.
м.
Для расчетов примем диаметр пачки dпач = 1,1 м. Если число деревьев в последней существенно отличается от приведенных на странице 20 то следует графически описать совокупность соприкасающихся диаметров в пачке окружностью, диаметр которой и будет искомой величиной dпач.
Зададимся высотой колонны h0 = 1,5 м. Этой высоте отвечает следующая суммарная длина стрелы и рукояти:
![]() ,
,
![]() м.
м.
Полученное значение одинаково для всех
случаев компоновки, отличающихся соотношением углов φ0, ψ0.
При φ0 = ψ0, используя выражение (3.6) и равенство ![]() ,
получаем
,
получаем
 ,
,
 м.
м.
При малых углах φ0 принимаем sinφ0 ≡ tgφ0 и тогда, можно записать
![]() м,
м,
![]() м.
м.
Длина рукояти
![]() м,
м,
Длина стрелы
![]() м.
м.
Зная длину стрелы, вычисляем угол φ0:
![]() м,
м,
![]() ,
φ0 = 18°.
,
φ0 = 18°.
В случае ψ0 = 2φ0 из второго уравнения (3.9) имеем
 ,
φ0 = 9°.
,
φ0 = 9°.
Длину рукояти находим по первому выражению (3.9):
 ,
,
 м.
м.
Длина стрелы
![]() м.
м.
Наконец, используя систему (3.10), оценим проектные параметры lс и lр в случае ψ0 = 0:
![]() м.
м.
Из последнего равенства получим расчетную формулу для определения угла φ0.
![]() м2
м2
![]() м,
м,
 ,
,
![]() м,
м,
 м,
м,
![]() м.
м.
Таким образом, из трех сравниваемых вариантов компоновки стрелы и рукояти первый и второй случаи равноценны, а в третьем – стрела оказалась длиннее на Δlс = 3,82 – 3,57 = 0,25 м. Поскольку линейный метр стрелы тяжелее, чем рукояти, то, с точки зрения минимальной металлоемкости, предпочтение следует отдать первым двум случаям. Последний случай, однако, имеет свои преимущества, в частности меньшие рабочие углы поворота стрелы (что положительно отражается на производительности, а также на компактности гидропривода управления стрелой), но вместе с тем угол поворота рукояти в данном случае несколько больший. Поэтому при сравнении рассматриваемых вариантов компоновки требуется тщательный технико-экономический анализ.
Поскольку суммарная длина стрелы и рукояти при принятой высоте колонны во всех случаях одинакова, то предпочтение отдадим первой или второй схемам, реализация которых проще третьей. При использовании последней схемы после укладки дерева в пачку требуется дополнительное движение стрелы на подъем для роспуска манипулятора.
Определив проектные параметры манипулятора и его компоновки на машине, необходимо построить рабочую зону для оценки функциональных ограничений и удовлетворения заданным техническим условиям.
Рабочей зоной манипулятора называется пространство, любая точка которого находится в зоне действия рабочего органа. Построение рабочей зоны начинается с фиксации рабочего положения над коником машины. Так как рабочий орган, подвешенный на конце манипулятора, имеет неопределенное положение, то для нахождения рабочей зоны достаточно построить границы, очерчиваемые точкой подвеса рабочего органа (рисунок 3.3).
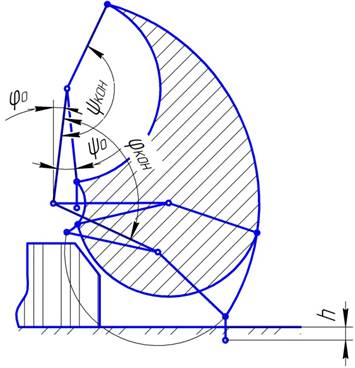
Рисунок 3.3 – Рабочая зона манипулятора в плоскости стрелы
Для шарнирно-сочлененного манипулятора границы движения точки в его плоскости представляют собой окружности. Сначала поворачивается рукоять относительно шарнира ее сочленения со стрелой, затем поворачивается манипулятор вместе со стрелой относительно шарнира сопряжения стрелы с колонной, далее движение продолжается до некоторого положения, определяемого ходом штока гидроцилиндра, стрела фиксируется в этом нижнем крайнем положении и происходит обратный поворот рукояти. Наконец, перемещая рукоять в исходное положение, производится поворот стрелы вместе со сложенной рукоятью. В результате образуется замкнутая граница области, любая точка которой досягаема для конца манипулятора. Поворачивая построенную заштрихованную область (фигуру) вокруг оси поворотной колонны на допустимые углы, получаем рабочую зону в пространстве. Если в этом пространстве окажутся элементы машины (колеса, отвал, гусеницы и пр.), то пересечение объемов определят функциональные ограничения, которые должны быть непременно выполнены соответствующей компоновкой гидропривода управления стрелой и рукоятью.
В результате построения допустимой рабочей зоны устанавливаем также предельные углы поворота стрелы и рукояти, которые являются исходными данными для расчета координат точек подвеса гидроцилиндров управления стрелой и рукоятью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.