






















МИНОБРНАУКИ РОССИИ
Государственное образовательное учреждение
Высшего профессионального образования
«Тульский государственный университет»
Кафедра РТиАП
Курсовой проект
Разработка модуля горизонтального выдвижения на основе пневмопривода.
Студент группы 220391 ______________
Руководитель работы ______________ к.т.н., проф.
Тула,
2013 г.
Содержание:
Введение………………………………………………………………………….3
1. Выбор конструктивно-компоновочной схемы ………………………...4
2. Определение силы сопротивления привода…………………………..5
3. Расчёт пневмоцилиндра и параметров питающей магистрали….8
3.1. Определение потребляемой мощности пневмоцилиндра……….8
3.2. Определение параметров линии пневмопитания…………………10
3.3. Определение величины движущей силы сопротивления………..11
3.4. Выбор площади поршня……………………………………………12
3.5. Определение конструктивных размеров………………………….13
4. Определение размеров вспомогательной призматической направляющей………….15
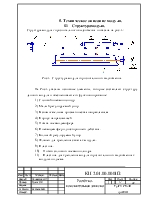
5. Техническое описание модуля………………………………………….17
5.1. Структура модуля……………………………………………………17
5.2. Принцип сборки проектируемого модуля………………………...18
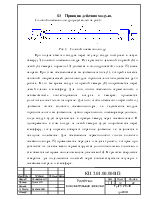
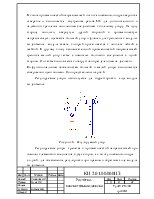
5.3. Принцип действия модуля…………………………………………19
6.Система управления модулем…………………………………………..23
6.1 Пневматическая схема управления модулем……………………………23
6.2 Описание работы пневмосистемы……………….……………………….25
7. Унификация поверхностей………………………………………………27
8. Выбор материалов…………………………………………………………29
Заключение…………………………………………………………………....31
Список литературы…………………………………………………………..32
Расчет модуля горизонтального линейного перемещения состоит из следующих пунктов:
- Определение сил сопротивления привода
- Расчет параметров пневмоцилиндра и параметров линии пневмопитания
- Определение габаритных размеров сечения направляющей
Техническое задание:
- Перемещаемая масса m=3 кг;
- Максимальная линейная скорость V= 0,5 м/с;
- Максимальное линейное перемещение Х= 0,3 м;
- Максимальный радиус действия R=0.4м
Листы для защиты:
1. Сборочный чертеж модуля горизонтального выдвижения.
2. Деталировка основных деталей модуля горизонтального выдвижения.
3. Расчет основных параметров модуля выдвижения.
При проектировании модуля выдвижения сначала выберем для него конструктивно-компоновочную (ККС), воспользуюсь для этого уже имеющимся списком стандартных ККС .
Руководствуясь требованиям технического задания, выберем компоновочно-кинематическую схему модуля горизонтального выдвижения робота с основной цилиндрической направляющей (шток пневмоцилиндра) и вспомогательной призматической направляющей.
В модулях данной группы к основной цилиндрической направляющей прикреплена вспомогательная призматическая направляющая, обеспечивающая угловую фиксацию модуля. Основная направляющая гарантирует прямолинейное движение, воспринимая боковую нагрузку, перпендикулярную оси движения. Вспомогательная направляющая, более тонкая и гибкая, по сравнению с основной.
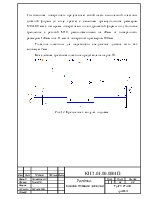
Для выбора конструктивно-компоновочных схем рассмотрим следующие схемы (Рис.1; Рис.2)

Рис.1- Конструктивно-компоновочная схема 1.
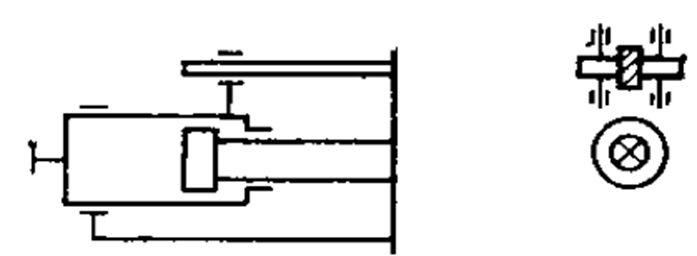
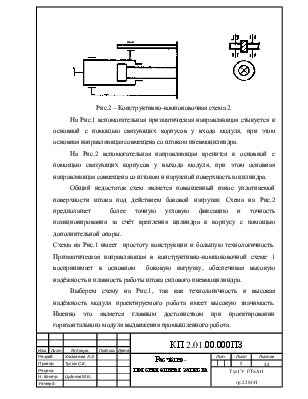
Рис.2 – Конструктивно-компоновочная схема 2.
На Рис.1 вспомогательная призматическая направляющая стыкуется к основной с помощью связующих корпусов у входа модуля, при этом основная направляющая совмещена со штоком пневмоцилиндра.
На Рис.2 вспомогательная направляющая крепится к основной с помощью связующих корпусов у выхода модуля, при этом основная направляющая совмещена со штоком и наружной поверхностью цилиндра.
Общий недостаток схем является повышенный износ уплотняемой поверхности штока под действием боковой нагрузки. Схема на Рис.2 предполагает более точную угловую фиксацию и точность позиционирования за счёт крепления цилиндра к корпусу с помощью дополнительной опоры.
Схема на Рис.1 имеет простоту конструкции и большую технологичность. Призматическая направляющая в конструктивно-компоновочной схеме 1 воспринимает в основном боковую нагрузку, обеспечивая высокую надёжность и плавность работы штока силового пневмоцилиндра.
Выберем схему на Рис.1, так как технологичность и высокая надёжность модуля проектируемого робота имеет высокую значимость. Именно это является главным достоинством при проектировании горизонтального модуля выдвижения промышленного робота.
1. Определение силы сопротивления привода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.