При подаче сжатого воздуха через штуцер, воздух поступает в левую камеру (3) силового пневмоцилиндра. Из-за разности давлений в правой (6) и левой (3) камерах поршень (2) движется в цилиндрической гильзе (5) слева направо. При этом обеспечивается выдвижение штока (1), который является основной направляющей данного модуля горизонтального выдвижения руки робота. В это же время воздух из правой камеры (6) опорожняется через левый клапан в атмосферу. Для того, чтобы обеспечить герметичность и невозможность контактирования воздуха в камерах, приеняется уплотнительное кольцо на поршне. Для того, чтобы обеспечить обратный ход движения штока силового пневмоцилиндра, т.е. задвижение модуля горизонтального выдвижениия, нужно переключить пневмораспределитель, тогда воздух будет затравляться в правую камеру через пневмоклапан. И одновременно с этим воздух из левой камеры будет опорожняться через атмосферу, тогда поршень совершит обратное движение, т.е. задвинется в исходное положение. Для обеспечения герметичности гильзы силового пневмоцилиндра (5) применяются передняя и задняя крышки, которые при установке их на свое место герметизируются уплотнительными кольцами и стягиваются четырьмя шпилечными соединениями (4). В крышках сверлются отверстия для подключения полостей через соответствующие штуцеры к пневмомагистрали и атмосфере.
![]()
Для того, чтобы обеспечить заданную точность перемещения детали модулем выдвижения, а также легкость и плавность движения используют вспомогательную направляющую. Так как направляющая призматическая, то ее сечение – квадрат. Выбор такой призматической направляющей обусловлено не только конструктивными особенностями модуля выдвижения, но и технологичностью изготовления, а также легкостью эксплуатации. Для работы без заклинивания, сечение лишается углов.
Призматическая направляющая качения устанавливается в закрытый корпус (4), разделенный на две половины с подшипниками линейного перемещения в нем. Эти две половины стягиваются десятью болтовыми соединениями, распределенными равномерно по всему корпусу. Для герметичности соединения используются прокладки.
Так как это закрытая направляющая, то зазоры между сопряженными через шарики подшипников поверхностями двух составных частей корпуса выбираем на основании конструктивных особенностей равными 1-1.3мм для обеспечения правильной посадки подшипников поступательного действия.
Корпус направляющей соединяется с силовым пневмоцилиндром при помощи соединительной пластины (9), которая стягивается шпилечными соединениями к его передней и задней крышкам.
Вспомогательная
призматическая направляющая и шток силового пневмоцилиндра соединяются между
собой большим упором, представленным на рис. 6. Конструктивно он выполняется в
виде двух частей, которые при стягивании с одной стороны болтовым соединением,
скрепляет вспомогательную призматическую направляющую и основную направляющую –
шток силового пневмоцилиндра![]() ,
обеспечивая при этом синхронность и параллельность их движения.
,
обеспечивая при этом синхронность и параллельность их движения.
![]() В
конце призматической направляющей и штока пневмоцилиндра сверлится отверстие и
выполняется внутренняя резьба М6 для дополнительного и надежного крепления
шпилечным соединением к большому упору. На одну сторону шпильки, ввернутую
другой стороной в призматическую направляющую, одевается большой упор и фланец
для крепления к модулю выдвижения модуля схвата, который притягивается к
шпильке гайкой с шайбой. К другому концу вспомогательной призматической
направляющей крепится малый упор также с помощью болтового соединения с одной
стороны. Он также выполняется конструктивно разделенным на две части.
В
конце призматической направляющей и штока пневмоцилиндра сверлится отверстие и
выполняется внутренняя резьба М6 для дополнительного и надежного крепления
шпилечным соединением к большому упору. На одну сторону шпильки, ввернутую
другой стороной в призматическую направляющую, одевается большой упор и фланец
для крепления к модулю выдвижения модуля схвата, который притягивается к
шпильке гайкой с шайбой. К другому концу вспомогательной призматической
направляющей крепится малый упор также с помощью болтового соединения с одной
стороны. Он также выполняется конструктивно разделенным на две части.
По функциональным особенностям большой и малый упоры выполняются совершенно идентичными. Они представлены на рис. 6.
Регулируемые упоры используется для корректировки хода модуля выдвижения.
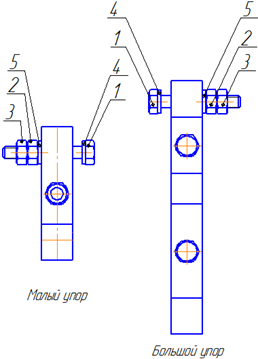
Рисунок 6 - Регулируемый упор
Регулируемые упоры крепятся к призматической направляющей при помощи клеммового соединения с двух сторон, а к штоку пневмоцилиндра –
с одной, для обеспечения регулировки при прямом и обратном ходе модуля выдвижения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.