Сила сопротивления
привода ![]() без учёта сил
трения складывается из силы сопротивления
без учёта сил
трения складывается из силы сопротивления ![]() от
неуравновешенности масс движущихся звеньев исполнительного устройства промышленного
робота и объекта манипулирования и динамической (инерционной) силы
от
неуравновешенности масс движущихся звеньев исполнительного устройства промышленного
робота и объекта манипулирования и динамической (инерционной) силы![]() , возникающей в момент
разгона и торможения этих звеньев и объекта манипулирования:
, возникающей в момент
разгона и торможения этих звеньев и объекта манипулирования:
![]()
Сила сопротивления привода от неуравновешенности масс определяется следующим образом: нужно спроектировать силу тяжести ИУ ПР на направление перемещения модуля горизонтального выдвижения:
![]()
где ![]() – масса движущихся
звеньев манипулирования, m – масса самого
объекта манипулирования,
– масса движущихся
звеньев манипулирования, m – масса самого
объекта манипулирования, ![]() - коэффициент
конструкции, который определяется по следующей формуле:
- коэффициент
конструкции, который определяется по следующей формуле:

Величина ![]() зависит от
ускорения, вида степени подвижности, от схемы расположения детали, и типа
привода.
зависит от
ускорения, вида степени подвижности, от схемы расположения детали, и типа
привода.
Коэффициент
конструкции находится в интервале: ![]() . Принимаем
. Принимаем ![]()
Динамическая (инерционная) сила определяется по формуле:
![]()
а – линейное ускорение.
Линейное ускорение в момент разгона определяется по формуле:

Где: v – номинальная линейная
скорость (м/с), Хр – путь разгона, х – полное линейное перемещение
(м), ![]() – коэффициент, учитывающий
характеристику цикла.
– коэффициент, учитывающий
характеристику цикла.
![]() . Принимаем
. Принимаем ![]() .
.
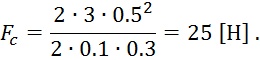
Тогда динамическая (инерционная) сила после подстановки линейного ускорения будет определяться следующим образом:
Для привода
горизонтального перемещения ![]() , тогда
, тогда ![]() . Поэтому формула
для расчёта силы сопротивления имеет вид:
. Поэтому формула
для расчёта силы сопротивления имеет вид:
1. Расчёт пневмоцилиндра и параметров питающей магистрали.
1.1. Определение потребляемой мощности пневмоцилиндра.
Привод должен иметь достаточную мощность для преодоления сопротивление нагрузки и перемещения её за заданное время на заданную величину. Поэтому мощность привода должна быть больше мощности, которая потребляется нагрузкой при рабочем ходе штока пневмоцилиндра.
Среднее значение мощности, которая потребляется нагрузкой определяется по следующему выражению:

где А — механическая работа, совершаемая при перемещении выходного звена привода (поршня); tдв— время движения поршня.
Общая работа A складывается из работы по разгону перемещаемой массы, те кинетической
энергии K и работы по
преодолению сил сопротивления движению ![]() :
:
![]()
![]() работа по
преодолению нагружающей силы.
работа по
преодолению нагружающей силы.
Атр — работа по преодолению сил трения.
Кинетическая энергия вычисляется по известной формуле:

где V - максимальная скорость поршня.
Будем полагать, что в первом приближении скорость поршня возрастает равномерно за время движения поршня.

Время движения поршня tдв
не равна времени срабатывания привода Т.Время
срабатывания привода определяется по формуле: ![]()
где tmp — время трогания, те время от момента включения двигателя до момента начала движения поршня.
Время трогания
составляет (0.1…0.3)T. Принимаем время
трогания: ![]() .
.
Отсюда найдем время срабатывания привода:

Работа
по преодоления сил нагрузки:  Т.к.
сила сопротивления Fс – постоянная
величина,то
Т.к.
сила сопротивления Fс – постоянная
величина,то ![]()
Определим теперь работу по преодолению сил трения. Сила сильно зависит от диаметра поршня, который нужно определить в проектных расчетах, а также от других параметров, которые ещё не выбраны. В первом приближении будем считать, что работа по преодолению сил трения не превышает 10%, от общей работы, которая расходуется на разгон перемещаемой массы и преодоление сил нагрузки:
![]()
Тогда среднее значение
мощности: ![]()
Найденное значение мощности – это значение мощности на выходе привода. Мощность на входе зависит от КПД. КПД пневмопривода -5-10%.
Поэтому
Nвх
=(10...20)N, примем Nвx=10N,
тогда ![]()
1.2 Определение параметров линии пневмопитания.
Для того, чтобы пропустить
через двигатель газовый поток мощностью ![]() , нужно обеспечить
достаточную площадь проходных сечений магистрали, через которые идет воздух.
, нужно обеспечить
достаточную площадь проходных сечений магистрали, через которые идет воздух.
Мощность газового потока, протекающего через отверстие площадью S:
![]()
Где: К - коэффициент,
зависящий от показателя адиабаты и режима течения газа. ![]()
![]() - скорость
течения газа при критическом режиме течения.
- скорость
течения газа при критическом режиме течения. ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.