Выберем материал вспомогательной призматической направляющей - Сталь 45. Значение допускаемого напряжения при изгибе для такой конструкционной стали равно:
![]()
Чтобы направляющая выдерживала все действующие на нее нагрузки: необходимо, чтобы значение действующего напряжения при изгибе было меньше допускаемого напряжения при изгибе, то есть:
![]()
Действующее напряжение при изгибе определяется в виде отношения изгибающего момента к моменту сопротивления сечения при изгибе, то есть:
где ![]() - изгибающий
момент в поперечном сечении призматической направляющей.
- изгибающий
момент в поперечном сечении призматической направляющей.
![]() - момент
сопротивления квадратного сечения изгибу.
- момент
сопротивления квадратного сечения изгибу.
Поэтому выбираем квадратное сечение направляющей, которое изображено на рис.3:
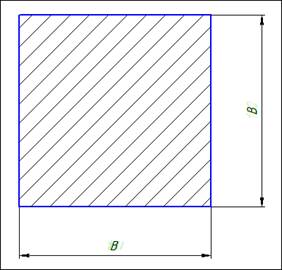
Рис.3 – сечение вспомогательной призматической направляющей.
Момент
сопротивления изгибу для квадратного сечения представляет следующее выражение: ![]()
Поэтому подставляя
предыдущее выражение в формулу для напряжения при изгибе, получим: ![]()
Изгибающий момент, действующий на сечение, представляет собой момент от силы тяжести, приложенный к перемещаемой массе, то есть:
![]()
Тогда выражая размер поперечного сечения, получим:

Находим геометрические размеры поперечного сечения:

Из справочника подбираем
стандартное сечение с размерами 7х7мм призматической вспомогательной направляющей,
те ![]()
![]()
![]() 5. Техническое
описание модуля.
5. Техническое
описание модуля.
5.1 Структура модуля.
Структура модуля горизонтального выдвижения показана на рис. 4:
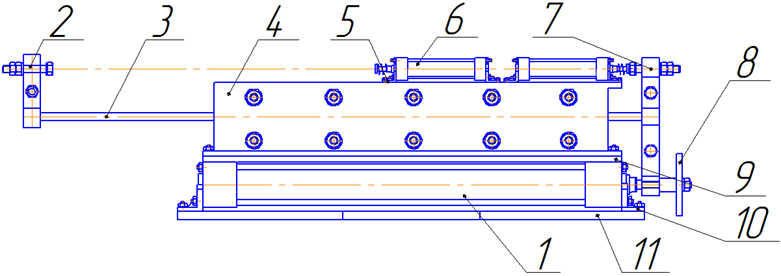
Рис.4 - Структура модуля горизонтального выдвижения.
На Рис.4 указаны основные элементы, которые составляют структуру данного модуля и обеспечивают его функционирование:
1) Силовой пневмоцилиндр
2) Малый регулируемый упор
3) Вспомогательная призматическая направляющая
4) Корпус направляющей
5) Ножка пневмодемпфера
6) Пневмодемпфер одностороннего действия.
7) Большой регулируемый упор
8) Фланец для крепления схвата к модулю.
9) Пластина.
10) Ножки силового пневмоцилиндра
11) Пластина для крепления модуля горизонтального выдвижения к модулю подъема.
Для описания принципов сборки проектируемого модуля, был использован сборочный чертёж КП 2.01.01.000 СБ. Шток силового пневмоцилиндра (2) крепится к поршню (6), с предварительно закреплённым уплотнительным кольцом (43), при помощи гайки, которая наворачивается на резьбу, нарезанную на штоке силового пневмоцилиндра. Данная конструкция устанавливается в гильзу (5) силового пневмоцилиндра и закрепляется передней и задней крышками (4) при помощи уплотнительных колец (44), то есть по линии стековки передней и задней крышек (4) с гильзой (5) используется уплотнение для герметизации соединения. Ножки силового пневмоцилиндра (3), передняя и задняя крышки (4) и гильза (5) силового пневмоцилиндра соединяются шпилечным крепёжным соединением, состоящим из шпильки типа (23) и гаек типа (24), шайб типа (25). На крышках силового пневмоцилиндра через соединительную 5-ти мм пластину (10) шпилечными крепежными соединениями крепится опора качения. Она состоит из корпуса (9), разделенный на две части, которые соединяются между собой и с уплотнительной прокладкой крепёжным болтовым соединением, состоящим из болта (34), 2-х гаек (35) и 2-х шайб (32), (33). В корпус крышку плотно сажается шариковый подшипник поступательного движения (8). Внутрь корпуса (9) устанавливается вспомогательная призматическая направляющая (7), оснащенная регулируемыми упорами (1) с помощью шпилечного соединения типа (22). Направляющая (7) и шток (4) скрепляются между собой с помощью корпуса большого регулируемого упора шпилечным соединением типа (22). К ножкам силового пневмоцилиндра (3) шпилечным соединением притягивается пластина (11) для стековки с модулем подъема. Два пневмодемфера (41) ножками (12) шпилечным соединением крепятся к опоре качения.
5.3 Принцип действия модуля.
Силовой пневмоцилиндр представлен на рис.5:

Рис.5 – Силовой пневмоцилиндр
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.