Содержание.
Введение. 3
Выбор конструктивно-компоновочной схемы. 4
Принцип действия. 5
Определение силы сопротивления привода. 6
Расчёт параметров и выбор пневмопривода. 7
Определение потребной мощности привода. 7
Определение параметров линии пневмопитания. 10
Оценка величины движущей силы сопротивления. 11
Выбор площади сечения поршня. 12
Определение конструктивных размеров. 13
Расчет основных параметров направляющей. 14
Выбор направляющей. 14
Силовой расчет направляющих. 15
Заключение. 18
Список использованной литературы. 19
Расчет модуля линейного перемещения включает в себя следующие пункты:
- определение силы сопротивление привода
- расчет пневмоцилиндра и параметров питающей магистрали
- расчет основных параметров направляющих
Для расчета необходимы следующие данные:
- Перемещаемая масса m=4 кг (складывающая из массы объектов манипулирования мом=2 кг, массы захватного устройство mзу= 1,5 кг и массы движущихся частей самого привода mпр= 0,5кг)
- Максимальная линейная скорость V= 0,5 м/с
- Максимальное линейное перемещение Х= 0,2 м
В результате расчета находятся размеры деталей и строятся следующие чертежи:
1. сборочный чертеж модуля выдвижения
2. деталировка основных деталей модуля выдвижения
Была выбрана конструктивно-компоновочная схема модуля выдвижение, см. рис.1
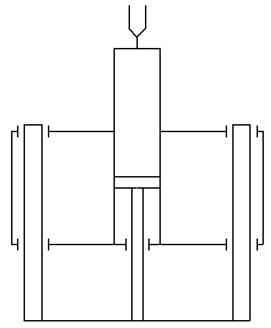
Данная схема содержит три направляющие: подвижную основную направляющую и две не подвижные вспомогательные направляющие.
Проанализировав возможность усовершенствования и упрощения схемы, были внесены следующие изменения.
В данной схеме роль основной цилиндрической направляющей играет пневмоцилиндр. Шток и две направляющие закреплены с фланцем. Для регулирования и плавности движения используются два демпфера.
Данная схема будет в дальнейшем рассматриваться как конструктивно-компоновочная схема модуля выдвижения.
При подачи сжатого воздуха через пневмораспределитель, воздух поступает в верхнюю камеру пневмоцилиндра.
В результате разностей давлений в камерах происходит движение цилиндра верх. Воздух из нижней камеры через стравливается в атмосферу.
Для обеспечение реверсивного хода необходимо переключить пневмораспределитель. В этом случае воздух из верхней камеры через дроссель будет стравливаться в атмосферу. Под действием силы тяжести подвижная часть модуля будет опускаться.
Сила сопротивления привода складывается из силы сопротивления от неуравновешенности системы звеньев исполнительного устройства промышленного робота и динамической( инерционной ) силы, возникающей в момент разгона и торможения этих звеньев.
FC=FH+FU
Силу сопротивления привода от неуравновешенности масс можно получить, если спроектировать силу тяжести системы звеньев исполнительного устройства ПР, расположенную между рассматриваемым приводом и рабочим органом с ОМ, приложенную в центре масс этой системы, на направление перемещения рассматриваемой поступательной степени подвижности:
F„=(![]() mK+m)-g-sin
mK+m)-g-sin![]() pK, где шк-
масса k-го звена (кг), т- масса
ОМ(кг), срк-обобщенная координата k-го звена(град.).
pK, где шк-
масса k-го звена (кг), т- масса
ОМ(кг), срк-обобщенная координата k-го звена(град.).
Динамическая сила равна:
Fui=(![]() mk+m)-ai=(
mk+m)-ai=(![]() Imk+m)-v2НOM,i /2Ku-Si
Imk+m)-v2НOM,i /2Ku-Si
где а;- линейное ускорение массы i-ro звена(м/с), VHOM i - номинальная линейная скорость i-ro звена(м/с), Si - полное линейное перемещение i-ro зве- на(м/с), кц- характеристика цикла i-ro привода.
Ku= Sp/s=0,1..0,5- коэффициент, равный отношению пути разгона или торможения к полному перемещению.
Для привода горизонтального перемещения:
Fc=k1*m*V2/2ku-x, где ki=1,4..2,3- коэффициент конструкции
Fc=(1,5*1,5*0,52 )/(2*0,5*0,2)=2,813 Н
Привод должен обладать достаточной мощностью, чтобы преодолеть сопротивление нагрузки и переместить ее за заданное время на заданную величину. Таким образом, мощность привода должна превосходить мощность потребляемой нагрузкой при совершении рабочего хода.
Среднее значение мощности, потребляемой нагрузкой есть
 , где А —
механическая работа, совершаемая при перемещении выходного звена привода (поршня);
tдв — время движения поршня.
, где А —
механическая работа, совершаемая при перемещении выходного звена привода (поршня);
tдв — время движения поршня.
Совершаемая работа А складывается из работы по разгону перемещаемой массы и работы по определению сил сопротивления движению, т.е
А=К+Ан+Атр,
где К— кинетическая энергия, сообщаемая перемещаемой массе;
Ан — работа по преодолению нагружающей силы; Атр — работа по преодолению сил трения.
Кинетическая энергия есть
 , где V — скорость поршня в конечный момент времени.
Для оценки значения скорости будем полагать, что в первом приближении скорость
поршня нарастает равномерно за время движения поршня.
, где V — скорость поршня в конечный момент времени.
Для оценки значения скорости будем полагать, что в первом приближении скорость
поршня нарастает равномерно за время движения поршня.
За время движения поршня tдв не тождественно заданному времени срабатывания привода Т. В действительности
Т=tтр+tдв,
где tтр — время трогания, проходящее от
момента включения двигателя до момента начала движения поршня. Время трогания
обычно составляет (0,1…..0,3)Т. Пусть ![]() .
.
Далее находим
![]() ,
,
 ,
,
 .
.
Работа по преодоления сил нагрузки Ан есть
 .
.
Полагая Fн=const, находим
![]() .
.
Найдем величину работы по преодолению сил трения Атр, полагают, что в рационально спроектированном приводе работа по преодолению сил трения не превышает 10% от суммарной работы, идущей на разгон приведенной массы и преодоление сил нагрузки, т.е можно считать, что
![]()
Следовательно
![]() .
.
Отсюда 
Найденная мощность — это мощность на выходе привода. Для того, чтобы привод выдал на выходе такое значение мощности
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




