3. Принципы построения систем
частотного управления
3.1. Законы частотного управления
Под законами частотного
управления принято понимать зависимости между действующим напряжением на
статоре ![]() и
частотой
и
частотой ![]() , поддерживаемые
в установившихся режимах так, что при изменении
, поддерживаемые
в установившихся режимах так, что при изменении ![]() с целью
изменения скорости вращения магнитного поля двигателя одновременно изменяется и
с целью
изменения скорости вращения магнитного поля двигателя одновременно изменяется и
![]() .
.
Как известно, свойства двигателя в установившихся режимах работы можно описать с использованием схемы замещения.
Введем в рассмотрение относительную частоту ![]() , где
, где ![]() – номинальное
значение частоты. Любому текущему значению частоты
– номинальное
значение частоты. Любому текущему значению частоты ![]() питающего
напряжения соответствует угловая скорость вращения магнитного поля и всех результирующих
(обобщенных) векторов, равная
питающего
напряжения соответствует угловая скорость вращения магнитного поля и всех результирующих
(обобщенных) векторов, равная ![]() , где
, где ![]() – число пар
полюсов. Номинальной частоте
– число пар
полюсов. Номинальной частоте ![]() соответствует
номинальная скорость поля
соответствует
номинальная скорость поля ![]() .
.
В теории частотного управления асинхронным двигателем вместо понятия «скольжение» используется понятие «абсолютное скольжение».
Так как скольжение S
равно  , где
, где ![]() – механическая
угловая скорость вращения вала двигателя, то можно осуществить преобразование:
– механическая
угловая скорость вращения вала двигателя, то можно осуществить преобразование:
 .
.
Абсолютным скольжением bназывается величина
 .
.
Следовательно, между скольжением S и абсолютным скольжением b
существует соотношение ![]() .
С учетом введенных обозначений схему замещения двигателя можно представить в
виде рис. 3.1.
.
С учетом введенных обозначений схему замещения двигателя можно представить в
виде рис. 3.1.
Возможно двухзонное частотное регулирование скорости, т. е. как в сторону уменьшения частоты, так и в сторону ее повышения по отношению к номинальной.
Во второй зоне регулирования (![]() )
частота напряжения изменяется при условии поддержания напряжения на неизменном
уровне, равном номинальному.
)
частота напряжения изменяется при условии поддержания напряжения на неизменном
уровне, равном номинальному.
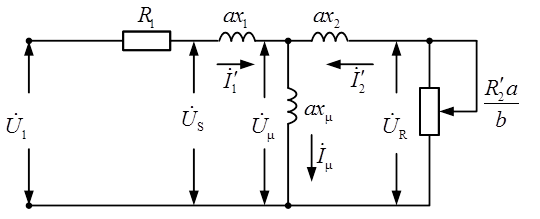
Рис. 3.1. Схема замещения асинхронного двигателя
при частотном управлении
В первой зоне регулирования (![]() )
одновременно со снижением частоты ниже номинального значения
)
одновременно со снижением частоты ниже номинального значения ![]() возникает
необходимость снижения напряжения. Это следует из уравнения
возникает
необходимость снижения напряжения. Это следует из уравнения
![]() , где
, где ![]() –
сопротивление статорных обмоток,
–
сопротивление статорных обмоток, ![]() – ток
статора,
– ток
статора, ![]() – число
витков фазных обмоток статора,
– число
витков фазных обмоток статора, ![]() – обмоточный
коэффициент,
– обмоточный
коэффициент, ![]() – магнитный
поток.
– магнитный
поток.
При незначительном (![]() ) диапазоне
регулирования скорости в первой зоне относительное значение падения
напряжения в первичной цепи невелико:
) диапазоне
регулирования скорости в первой зоне относительное значение падения
напряжения в первичной цепи невелико:
![]() .
.
Из последнего выражения следует, что при ![]() снижение
частоты приводит к увеличению потока двигателя.
снижение
частоты приводит к увеличению потока двигателя.
Существенное увеличение магнитного потока нежелательно, т. к.
это вызывает насыщение магнитной цепи, значительное увеличение тока намагничивания.
Так, уже изменение ![]() на
10 % приводит к увеличению намагничивающего тока на 20–30 %. Изменение частоты
в более широких пределах приводит к более существенному увеличению
на
10 % приводит к увеличению намагничивающего тока на 20–30 %. Изменение частоты
в более широких пределах приводит к более существенному увеличению ![]() . Отмеченное
обстоятельство ведет к интенсивному нагреванию двигателя, снижению его
энергетических показателей и срока службы.
. Отмеченное
обстоятельство ведет к интенсивному нагреванию двигателя, снижению его
энергетических показателей и срока службы.
Нежелательно также существенное снижение магнитного потока, т. к. при этом снижается перегрузочная способность двигателя с одновременным перегревом двигателя, что следует из выражения
![]() , где k– конструктивный
коэффициент,
, где k– конструктивный
коэффициент, ![]() – ток ротора,
– ток ротора, ![]() –
коэффициент мощности вторичной цепи.
–
коэффициент мощности вторичной цепи.
В связи с изложенным при построении систем частотного регулирования
скорости асинхронного двигателя вниз от основной скорости (![]() ) стремятся
поддерживать магнитный поток примерно на том же уровне, который обеспечивается
при номинальном режиме работы двигателя. При этом используется один из следующих
законов регулирования:
) стремятся
поддерживать магнитный поток примерно на том же уровне, который обеспечивается
при номинальном режиме работы двигателя. При этом используется один из следующих
законов регулирования:
 (3.1)
(3.1)
 (3.2)
(3.2)
 (3.3)
(3.3)
 (3.4)
(3.4)
Наиболее простой закон (3.1) используется при необходимости регулирования скорости в небольшом диапазоне, когда падение напряжения в обмотках статора мало влияет на величину тока намагничивания.
Исходя из баланса активной мощности в роторе [9]
 .
.
Определяя ток ротора ![]() из
схемы замещения (рис. 3.1) и пренебрегая сопротивлением
из
схемы замещения (рис. 3.1) и пренебрегая сопротивлением ![]() статорной
обмотки, можно получить следующее приближенное выражение для электромагнитного
момента двигателя:
статорной
обмотки, можно получить следующее приближенное выражение для электромагнитного
момента двигателя:
 .
.
Определив из (3.5) известными способами критическое
значение абсолютного скольжения ![]() и
учитывая, что
и
учитывая, что ![]() ,
получим следующее выражение для критического момента:
,
получим следующее выражение для критического момента:
 .
.
Следовательно, при рассмотренных условиях во всем диапазоне регулирования скорости поддерживается постоянство перегрузочной способности двигателя, под которой понимают величину
 .
.
Системы частотного регулирования, реализующие закон регулирования
(3. 1), обеспечивают диапазон регулирования скорости до ![]() при статизме
механической характеристики в пределах 5–10 %.
при статизме
механической характеристики в пределах 5–10 %.
Для момента сопротивления ![]() ,
зависящего от скорости, закон регулирования (3.4) можно заменить следующими
законами [9]:
,
зависящего от скорости, закон регулирования (3.4) можно заменить следующими
законами [9]:
 при
при ![]() ,
,
 при
при ![]() ,
,
при  .
.
Однако, как показано в [1], во всех случаях удовлетворительные результаты обеспечивает закон (3.4).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.