В системах прямого управления
моментом (в зарубежной литературе DTC – Direct Torque Control) потокосцепление статора ![]() является
одной из регулируемых координат двигателя. В контуре регулирования
является
одной из регулируемых координат двигателя. В контуре регулирования ![]() реализуется
скользящий режим, что обеспечивает высокую точность поддержания заданного
значения
реализуется
скользящий режим, что обеспечивает высокую точность поддержания заданного
значения ![]() . При
задании и регулировании
. При
задании и регулировании ![]() значение
потокосцепления ротора
значение
потокосцепления ротора ![]() системой
регулирования не контролируется.
системой
регулирования не контролируется.
Как следует из выражения (3.12), единственной
координатой, за счет изменения которой можно регулировать электромагнитный
момент, является угол ![]() ,
характеризующий взаимное расположение векторов
,
характеризующий взаимное расположение векторов ![]() и
и ![]() . При
этом значение
. При
этом значение ![]() можно
изменять, лишь изменяя положение вектора
можно
изменять, лишь изменяя положение вектора ![]() по
отношению к вектору
по
отношению к вектору ![]() .
.
На рис. 3.25, где ![]() –
–![]() –
полностью управляемые ключи автономного инвертора напряжения (рис. 2.1),
показаны 8 возможных состояния ключей, которые формируют шесть ненулевых и два
нулевых вектора напряжения
–
полностью управляемые ключи автономного инвертора напряжения (рис. 2.1),
показаны 8 возможных состояния ключей, которые формируют шесть ненулевых и два
нулевых вектора напряжения ![]() .
Изменение угла
.
Изменение угла ![]() осуществляется
за счет выбора такого вектора напряжения из восьми возможных
осуществляется
за счет выбора такого вектора напряжения из восьми возможных ![]() –
–![]() ,
который обеспечивает необходимое изменение электромагнитного момента.
Одновременно с изменением момента изменится также и
,
который обеспечивает необходимое изменение электромагнитного момента.
Одновременно с изменением момента изменится также и ![]() .
.
Таким образом, при работе системы
регулирования вектор напряжения ![]() переходит
из одного сектора в другой (рис. 3.26), а это обеспечивает поворот вектора
потокосцепления статора
переходит
из одного сектора в другой (рис. 3.26), а это обеспечивает поворот вектора
потокосцепления статора ![]() . В
результате, несмотря на то, что векторные преобразования в системе с прямым
управлением моментом отсутствуют, обеспечивается вращение вектора
. В
результате, несмотря на то, что векторные преобразования в системе с прямым
управлением моментом отсутствуют, обеспечивается вращение вектора ![]() с
требуемой скоростью при поддержании модуля вектора на заданном уровне.
с
требуемой скоростью при поддержании модуля вектора на заданном уровне.
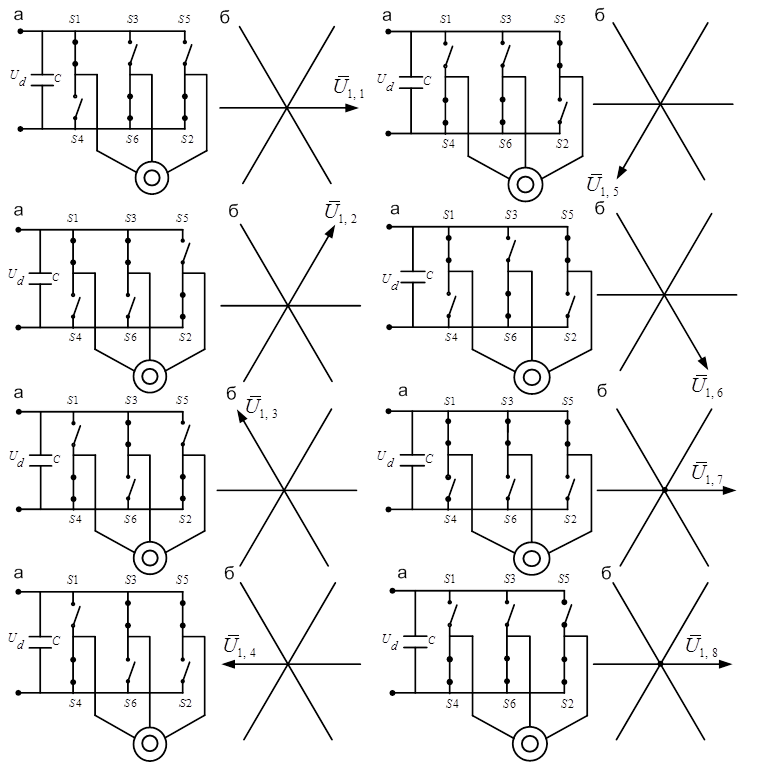
Рис. 3.25. Принцип формирования вектора напряжения:
а – диаграммы состояния полностью управляемых ключей;
б – векторы напряжения
Функциональная схема наиболее
распространенного варианта электропривода, реализующего описанный способ
формирования электрического момента, приведена на рис. 3.27. Здесь PC, PM, PП –
регуляторы скорости, момента и потокосцепления соответственно; ![]() –
формирователь таблицы переключений триггеров автономного инвертора;
–
формирователь таблицы переключений триггеров автономного инвертора; ![]() – формирователь
фазных напряжений.
– формирователь
фазных напряжений.
В релейно-гистерезисных регуляторах момент q и
потокосцепление сравниваются заданные значения регулируемых координат с их
значениями, вычисленными в модели асинхронного двигателя, и формируются логические
сигналы для формирователя ![]() ,
который управляет транзисторами инвертора. Настраиваемая полуширина петли
гистерезиса каждого из регуляторов характеризует максимальное отклонение
регулируемых координат от заданных значений.
,
который управляет транзисторами инвертора. Настраиваемая полуширина петли
гистерезиса каждого из регуляторов характеризует максимальное отклонение
регулируемых координат от заданных значений.
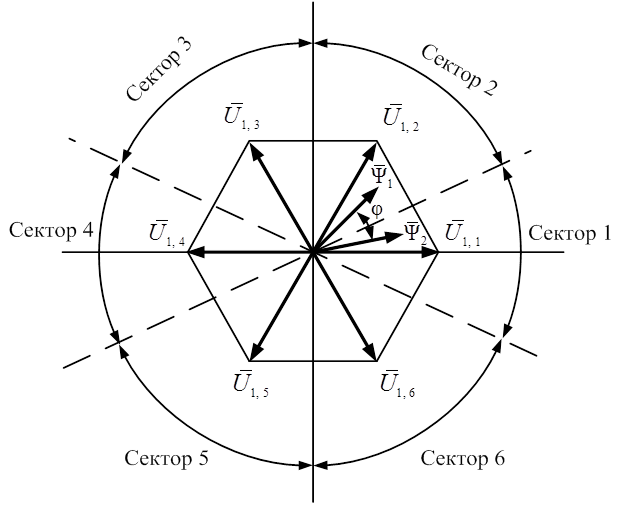
Рис. 3.26. Расположение векторов напряжения
и векторов потокосцеплений
В результате применения релейных регуляторов с гистерезисом в системе с прямым управлением моментом реализуется двумерный скользящий режим.
Известно, что системы регулирования, в которых создаются скользящие режимы, обладают рядом особенностей:
- существующие в объекте регулирования перекрестные обратные связи мало влияют на формирование переходных процессов;
- системы приобретают свойства грубости;
- появляется инвариантность к изменениям некоторых параметров объекта управления и возмущений;
- понижается порядок дифференциальных уравнений.
Дополнительной особенностью систем прямого управления моментом асинхронного двигателя является объединение задач ШИМ и регулирования момента, в связи с чем отсутствует необходимость программной реализации широтно-импульсной модуляции напряжения на выходе инвертора напряжения.
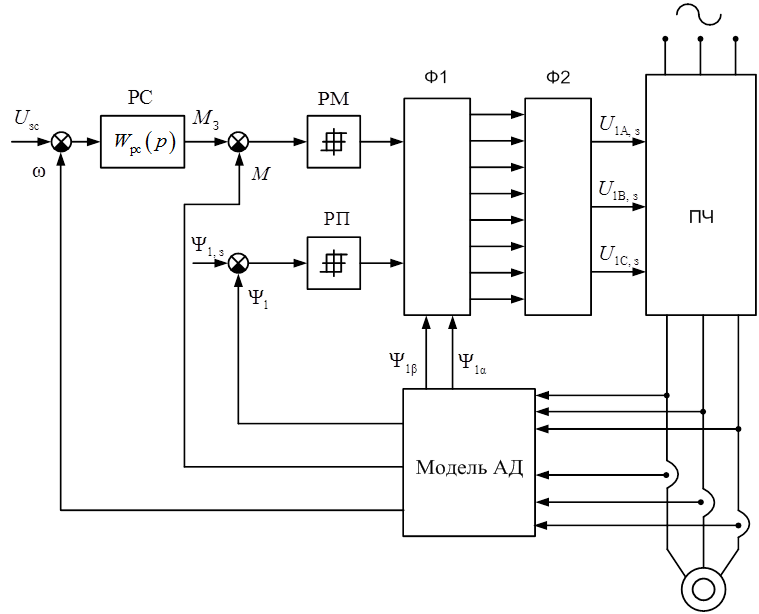
Рис. 3.27. Функциональная схема системы
с прямым управлением моментом
Отмеченные особенности систем с прямым управлением моментом обеспечивают высокое качество регулирования. В модели двигателя оценки регулируемых координат вычисляются с помощью следующих уравнений:
 ,
,
 ,
,
 .
.
Вектор напряжения ![]() определяется
на основе измеренного напряжения в звене постоянного тока
определяется
на основе измеренного напряжения в звене постоянного тока ![]() преобразователя
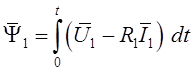
частоты и текущего состояния транзисторов инвертора. Точность расчета вектора
преобразователя
частоты и текущего состояния транзисторов инвертора. Точность расчета вектора ![]() корректируется
на основе измеренных и вычисленных значений токов в соответствии с выражением
корректируется
на основе измеренных и вычисленных значений токов в соответствии с выражением
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.