Из-за использования операций интегрирования при вычислении потокосцепления
статора система весьма чувствительна к точности определения значения активного
сопротивления статора ![]() .
В то же время чувствительность системы к изменениям
.
В то же время чувствительность системы к изменениям ![]() и
индуктивностей двигателя невелика [1]. В целом чувствительность систем с прямым
управлением моментом к изменениям параметров двигателя выше соответствующих
показателей систем векторного управления.
и
индуктивностей двигателя невелика [1]. В целом чувствительность систем с прямым
управлением моментом к изменениям параметров двигателя выше соответствующих
показателей систем векторного управления.
Для синтеза регулятора скорости можно использовать
расчетную схему, приведенную на рис. 3.28. Здесь ![]() –
коэффициент обратной связи по моменту,
–
коэффициент обратной связи по моменту, ![]() –
эквивалентная постоянная времени контура регулирования момента.
–
эквивалентная постоянная времени контура регулирования момента.
Используя типовую методику синтеза систем подчиненного регулирования, получим:
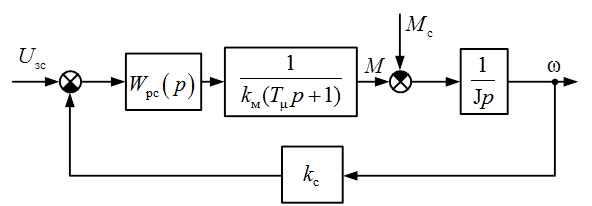
Рис. 3.28. Расчетная схема контура
регулирования скорости
Работа системы с прямым управлением моментом связана с большим количеством вычислений. В связи с этим информационные процессы реализуются в микропроцессорном варианте.
В процессе ввода электропривода в эксплуатацию в режиме «идентификация» осуществляется настройка регулятора скорости с учетом фактических значений параметров двигателя.
В системе без датчика скорости достигается точность регулирования в установившемся режиме в пределах (0,1–0,5) %, при использовании датчика скорости – до 0,01 %.
Система регулирования снабжена устройством независимого задания потока статора двигателя. Это позволяет регулировать двухзонное регулирование или обеспечить работу электропривода в режиме энергосбережения. Так в режиме малых нагрузок снижение потока статора позволяет снизить потери до 60 %.
3.7. Компенсация температурного изменения
параметров двигателя
Параметры асинхронного двигателя аналитически могут
быть рассчитаны весьма приблизительно. К тому же в процессе работы двигателя некоторые
параметры двигателя могут изменяться в широких пределах. При векторном
управлении с поддержанием потокосцепления ротора изменения индуктивностей ![]() несущественны.
В то же время активные сопротивления
несущественны.
В то же время активные сопротивления ![]() ,
, ![]() подвержены
существенному влиянию температуры их нагрева. Наиболее сильное влияние на
работоспособность электропривода оказывает изменение активного сопротивления
обмоток ротора
подвержены
существенному влиянию температуры их нагрева. Наиболее сильное влияние на
работоспособность электропривода оказывает изменение активного сопротивления
обмоток ротора ![]() [11].
[11].
При векторном управлении с косвенной ориентацией по вектору ![]() неточное
определение значения
неточное
определение значения ![]() нарушает
условия косвенной ориентации систем координации по вектору потокосцепления
ротора. Это приводит к снижению запасов устойчивости и повышению
колебательности процессов. В [14] показано, что при угловой ошибке
ориентирования осей
нарушает
условия косвенной ориентации систем координации по вектору потокосцепления
ротора. Это приводит к снижению запасов устойчивости и повышению
колебательности процессов. В [14] показано, что при угловой ошибке
ориентирования осей ![]() и
x по вектору
и
x по вектору ![]() ,
превышающей
,
превышающей ![]() ,
система векторного управления теряет работоспособность.
,
система векторного управления теряет работоспособность.
Для обеспечения работоспособности электропривода в
современных преобразователях частоты предусматривается предварительная (до
подачи задающих сигналов) идентификация параметров двигателя с последующей
компенсацией температурного изменения ![]() . В [11]
показано, что в наиболее простых системах векторного управления при отсутствии
узлов компенсации влияния температуры на параметры двигателя наилучшие результаты
обеспечивает настройка регуляторов с учетом сопротивления
. В [11]
показано, что в наиболее простых системах векторного управления при отсутствии
узлов компенсации влияния температуры на параметры двигателя наилучшие результаты
обеспечивает настройка регуляторов с учетом сопротивления ![]() в
холодном состоянии двигателя.
в
холодном состоянии двигателя.
ЗАКЛЮЧЕНИЕ
Асинхронные электроприводы с частотным регулированием скорости составляют значительную часть вновь вводимых регулируемых электроприводов. Во многих случаях модернизация электроприводов заключается в замене приводов постоянного тока на электроприводы переменного тока. В связи с изложенным подготовка инженеров, обладающих достаточными знаниями в области частотноуправляемых электроприводов, является актуальной задачей.
Асинхронный электродвигатель, являясь самым простым по конструкции вариантом электрической машины, имеет более сложное по сравнению с двигателем постоянного тока математическое описание. Для упрощения математической модели асинхронной машины вводятся результирующие векторы трехфазной системы напряжений, токов и потокосцеплений, с помощью которых трехфазная машина преобразуется в эквивалентную двухфазную машину.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.