Рассмотрим работу контуров тока. Для определенности
возьмем контур регулирования тока в фазе А. Характеристика «вход-выход» регулятора
показана на рис. 3.21, а. Допустим, что формируется положительная полуволна
тока ![]() . При
этом в активном состоянии находятся транзисторы VT1,
VT2, VT6, причем VT2 и VT6
открыты постоянно в течение
. При
этом в активном состоянии находятся транзисторы VT1,
VT2, VT6, причем VT2 и VT6
открыты постоянно в течение ![]() , а VT1
периодически находится то в открытом, то в закрытом состояниях, обеспечивая
ШИМ.
, а VT1
периодически находится то в открытом, то в закрытом состояниях, обеспечивая
ШИМ.
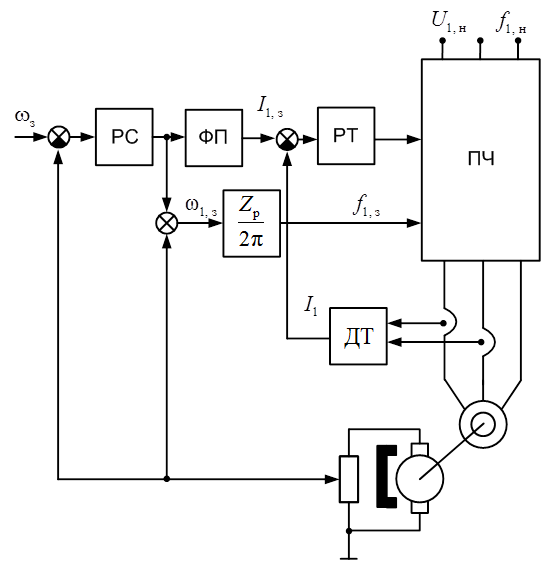
Рис. 3.19. Функциональная схема электропривода
с частотно-токовым управлением
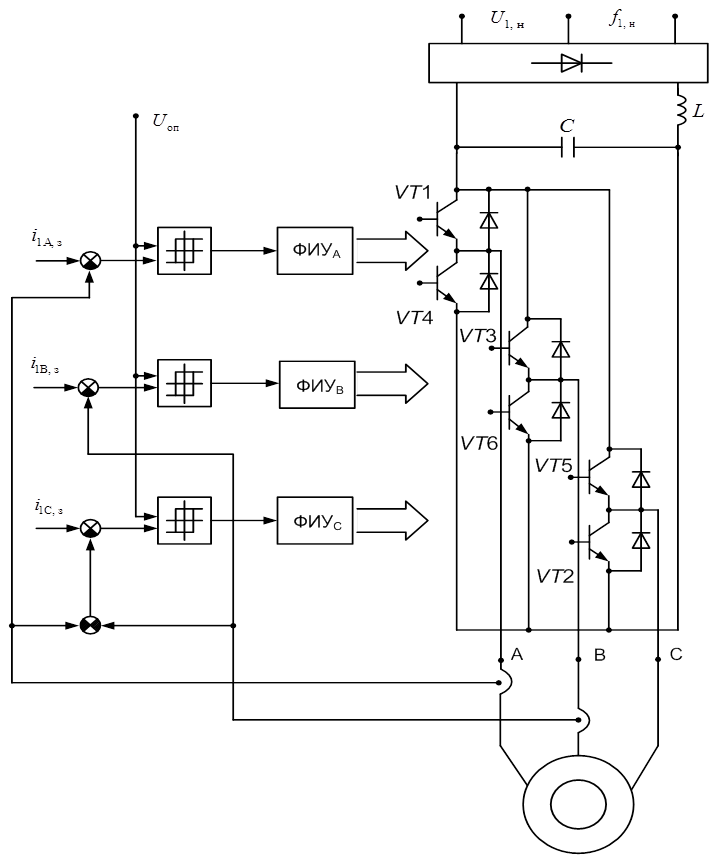
Рис. 3.20. Функциональная схема контуров регулирования тока
Рассмотрение начнем с момента, когда ошибка
регулирования ![]() равна
нулю (точки
равна
нулю (точки ![]() и
и ![]() на рис.
3.21). Так как выходное напряжение регулятора положительно, транзистор VT1
открывается и фаза A подключается к положительной шине
выпрямителя. Обычно напряжение
на рис.
3.21). Так как выходное напряжение регулятора положительно, транзистор VT1
открывается и фаза A подключается к положительной шине
выпрямителя. Обычно напряжение ![]() на
выходе выпрямителя существенно выше номинальной ЭДС двигателя. Поэтому ток в
обмотке фазы начинает быстро нарастать. Темп изменения
на
выходе выпрямителя существенно выше номинальной ЭДС двигателя. Поэтому ток в
обмотке фазы начинает быстро нарастать. Темп изменения ![]() существенно
выше темпа изменения
существенно
выше темпа изменения ![]() ,
ошибка регулирования становится отрицательной. Когда рассогласование
,
ошибка регулирования становится отрицательной. Когда рассогласование ![]() превысит
половину ширины петли гистерезиса
превысит
половину ширины петли гистерезиса ![]() (точки
(точки ![]() и
и ![]() ),
регулятор переходит в новое состояние (точка 3), транзистор VT1
закрывается и открывается транзистор VT4, фаза А подключается к отрицательной шине.
Ток
),
регулятор переходит в новое состояние (точка 3), транзистор VT1
закрывается и открывается транзистор VT4, фаза А подключается к отрицательной шине.
Ток ![]() начинает
уменьшаться. Ошибка регулирования вначале достигает нуля (точки
начинает
уменьшаться. Ошибка регулирования вначале достигает нуля (точки ![]() и
и ![]() ), а
затем становится положительной.
), а
затем становится положительной.
Когда ошибка ![]() достигнет
значения
достигнет
значения ![]() (точки
(точки ![]() и
и ![]() ), регулятор
вернется в первоначальное состояние (точки
), регулятор
вернется в первоначальное состояние (точки ![]() и
и ![]() ), транзистор
VT4 закрывается и открывается VT1.
Ток фазы А начинает интенсивно возрастать. При этом регулятор перейдет
последовательно из состояния 6 в состояния 1 и 2, а далее – в состояние 3.
Транзистор VT1 закрывается и открывается VT4.
Далее регулятор продолжает циклически переходить из состояния 3 в состояния 4, 5,
6, 1, 2, 3 и т. д. В результате работы системы регулирования ток
), транзистор
VT4 закрывается и открывается VT1.
Ток фазы А начинает интенсивно возрастать. При этом регулятор перейдет
последовательно из состояния 6 в состояния 1 и 2, а далее – в состояние 3.
Транзистор VT1 закрывается и открывается VT4.
Далее регулятор продолжает циклически переходить из состояния 3 в состояния 4, 5,
6, 1, 2, 3 и т. д. В результате работы системы регулирования ток ![]() постоянно
находится в «коридоре», ограниченном значениями
постоянно
находится в «коридоре», ограниченном значениями ![]() и
и ![]() . С
учетом инерционности контура регулирования, определяемой индуктивностью обмоток
статора, переходный процесс изменения тока
. С
учетом инерционности контура регулирования, определяемой индуктивностью обмоток
статора, переходный процесс изменения тока ![]() будет более
«сглаженным» по сравнению с примером, приведенным на рис. 3.21, б.
будет более
«сглаженным» по сравнению с примером, приведенным на рис. 3.21, б.
При рассматриваемом способе регулирования текущее
значение тока статора постоянно удерживается в заданном «коридоре». Если ширина
«коридора», зависящего от ширины петли гистерезиса регулятора, невелика, то
текущее значение тока с высокой точностью «следует» за изменением задания ![]() .
.
Следовательно, инвертор напряжения, охваченный отрицательной обратной связью по току, при релейно-гистерезисном регуляторе тока превращается в источник тока. В первом приближении контур тока можно считать безынерционным.
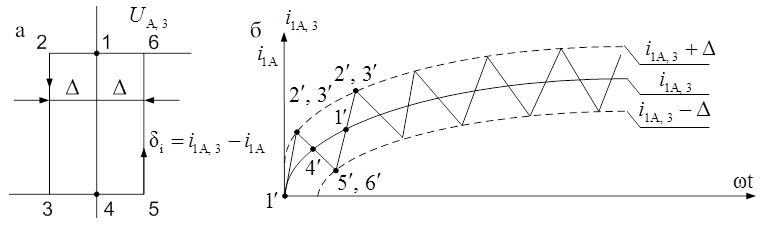
Рис. 3.21. Принцип действия регуляторов тока:
а – характеристика вход – выход регулятора;
б – изменение тока статора
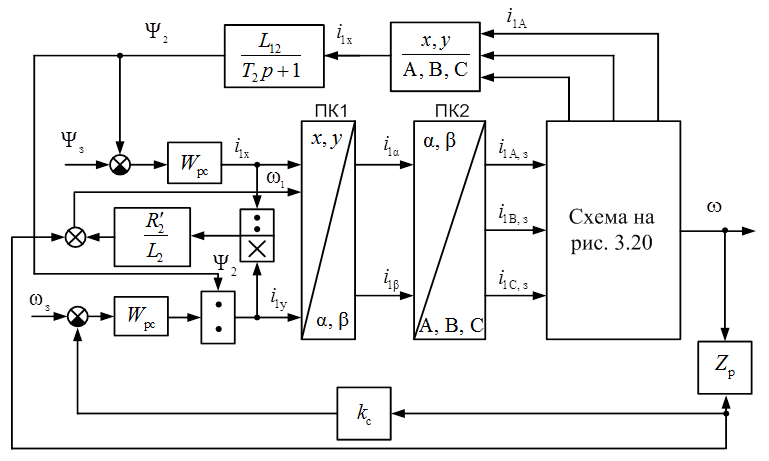
Рис. 3.22. Функциональная схема системы
векторного частотно-токового управления
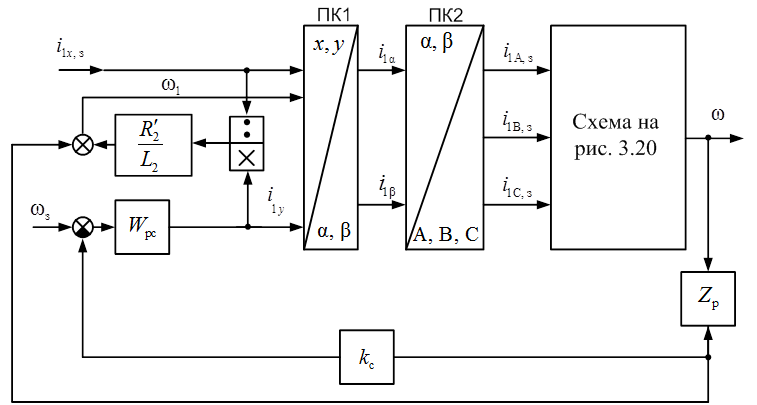
Рис. 3.23. Функциональная схема электропривода
с векторным частотно-токовым управлением
В приведенном анализе работы контура тока не учитывался
процесс ШИМ. С учетом широтно-импульсной модуляции характер изменения тока
несколько изменяется. Это проявляется в том, что под действием высокочастотного
опорного напряжения ![]() переключения
регуляторов могут происходить не только при достижении границ, ограниченных значениями
переключения
регуляторов могут происходить не только при достижении границ, ограниченных значениями
![]() и
и ![]() , но и
внутри области, ограниченной этими границами. При этом дополнительно повышается
точность регулирования тока.
, но и
внутри области, ограниченной этими границами. При этом дополнительно повышается
точность регулирования тока.
Принцип частотно-токового управления может использоваться также при построении систем векторного управления. Структурные схемы соответствующих систем приведены на рис. 3.22 и рис. 3.23. При этом схема на рис. 3.22 соответствует схеме, показанной на рис. 3.10, а схема на рис. 3.23 – схеме на рис. 3.14.
3.6. Системы с прямым управлением моментом
Из выражения (1.39) следует, что для формирования электромагнитного момента можно воздействовать на векторы потокосцеплений статора и ротора двигателя.
Если взаимное расположение векторов ![]() и
и ![]() соответствует
рис. 3.24, то
соответствует
рис. 3.24, то
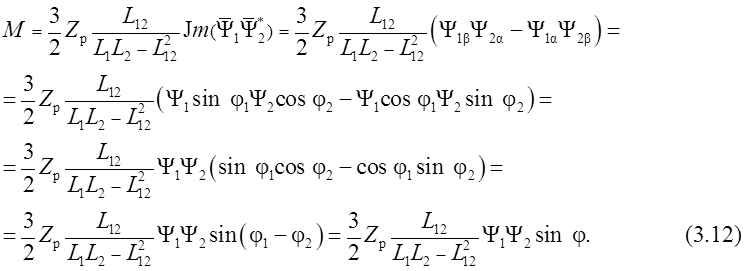
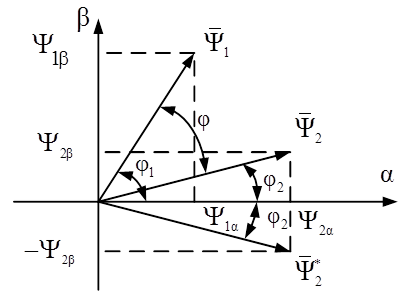
Рис. 3.24. Расположение векторов потокосцепления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.