![]() .
.
С другой стороны, при малых скольжениях
 , где
, где ![]() – номинальное значение абсолютного скольжения.
– номинальное значение абсолютного скольжения.
При условии ![]() из
(3.9) и (3.10) следует, что
из
(3.9) и (3.10) следует, что
 .
.
Отклонение скорости вращения ротора от скорости вращения магнитного поля равно
 .
.
Значение ![]() приблизительно
можно определить исходя из номинального режима. Полагая, что
приблизительно
можно определить исходя из номинального режима. Полагая, что ![]() , для
номинального режима получим:
, для
номинального режима получим:
![]() .
.
Номинальное значения ![]() активной составляющей
тока статора можно определить по каталожным значениям коэффициента мощности
активной составляющей
тока статора можно определить по каталожным значениям коэффициента мощности ![]() и полного
тока
и полного
тока ![]() :
:
![]() .
.
Тогда
и сигнал, компенсирующий скольжение, должен быть равен
При реализации закона (3.7) или
при реализации зависимости (3.6). Следовательно, коэффициент передачи ФП3 ориентировочно можно принять равным
 .
.
Влияние положительной обратной связи по току,
осуществляемой ФП3, связано с воздействием на частоту ![]() . За
счет этого при росте нагрузки на валу двигателя увеличивается скорость
идеального холостого хода, обеспечивая стабилизацию скорости двигателя.
Обратная связь с помощью ФП2 воздействует на величину напряжения
. За
счет этого при росте нагрузки на валу двигателя увеличивается скорость
идеального холостого хода, обеспечивая стабилизацию скорости двигателя.
Обратная связь с помощью ФП2 воздействует на величину напряжения ![]() ,
обеспечивая постоянную перегрузочную способность двигателя.
,
обеспечивая постоянную перегрузочную способность двигателя.
Совокупность положительных обратных связей по току увеличивает жестокость механических характеристик двигателя и обеспечивает диапазон регулирования до D = 10.
Для защиты преобразователя частоты и двигателя от перегрузок по току используется режим токовой отсечки. Функциональная схема электропривода с токовой отсечкой с реализацией закона (3.7) приведена на рис. 3.7.
При превышении допустимого тока на вход
пропорционально-интегрального регулятора тока РТ поступает разность токов ![]() , сигнал
на выходе РТ интенсивно начинает нарастать, при этом одновременно снижаются
частота и напряжение на выходе ПЧ.
, сигнал
на выходе РТ интенсивно начинает нарастать, при этом одновременно снижаются
частота и напряжение на выходе ПЧ.
Коэффициент ![]() подбирается
таким образом, чтобы обратная связь, реализуемая регулятором тока, была более
сильной, чем положительная обратная связь, реализуемая ФП3. Кроме этого,
учитываются условия устойчивости.
подбирается
таким образом, чтобы обратная связь, реализуемая регулятором тока, была более
сильной, чем положительная обратная связь, реализуемая ФП3. Кроме этого,
учитываются условия устойчивости.
Коэффициент ![]() подбирается
исходя из условия стабилизации магнитного потока и условий устойчивости.
подбирается
исходя из условия стабилизации магнитного потока и условий устойчивости.
С целью повышения точности регулирования системы, приведенные на рис. 3.5–3.7, могут дополняться контурами регулирования напряжения. Функциональная схема системы регулирования с контуром напряжения, соответствующая приведенной на рис. 3.5 системе, показана на рис. 3.8, а. Здесь РH, ДH – регулятор напряжения и датчик напряжения соответственно. Аналогичным образом вводится контур напряжения и в других системах.
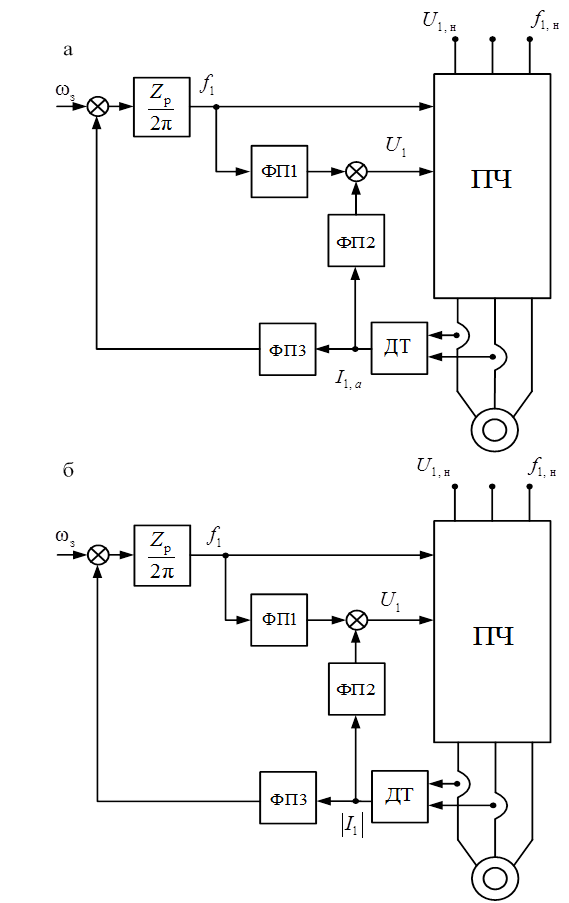
Рис. 3.6. Функциональная схема электропривода:
а – реализация закона (3.7), б – реализация зависимости (3.6)
Контур регулирования напряжения настраивается на модульный (технический) оптимум. Принимая передаточную функцию преобразователя частоты равной
 , получим:
, получим:
 .
.
Рекомендуется принимать значение постоянной времени ![]() равной
равной ![]() .
.
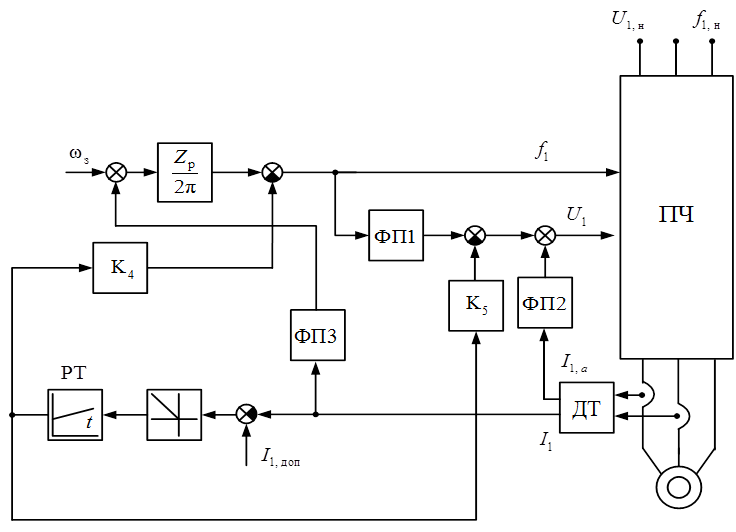
Рис. 3.7. Функциональная схема электропривода
с токовой отсечкой
Для увеличения диапазона регулирования скорости системы, реализующие закон (3.5), могут дополняться отрицательной обратной связью по скорости. В этом случае базовой является система, показанная на рис. 3.7, и дополненная контуром напряжения. Функциональная схема соответствующей системы приведена на рис. 3.9, где PC – регулятор скорости. Настройка функциональных преобразователей соответствует настройке в схеме на рис. 3.7.
При пропорционально-интегральном PC
интегральная составляющая регулятора обеспечивает такое приращение частоты при увеличении
нагрузки на валу двигателя, при котором частота выходного напряжения ПЧ
становится равной ![]() .
Одновременно с изменением частоты за счет функционального преобразователя ФП1
увеличивается и выходное напряжение ПЧ.
.
Одновременно с изменением частоты за счет функционального преобразователя ФП1
увеличивается и выходное напряжение ПЧ.
Увеличение частоты приводит к восстановлению скорости
после ее изменения вследствие наброса нагрузки на валу двигателя, а увеличение
напряжения скомпенсирует дополнительное падение напряжения в сопротивлении ![]() ,
вызванное увеличением тока статора при увеличении нагрузки на валу, вследствие
чего восстанавливается поток намагничивания.
,
вызванное увеличением тока статора при увеличении нагрузки на валу, вследствие
чего восстанавливается поток намагничивания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.