При регулировании частоты и напряжения согласно (3.1)
при малых ![]() значениях
частоты падение напряжения в сопротивлении
значениях
частоты падение напряжения в сопротивлении ![]() существенно
снижает величину напряжения
существенно
снижает величину напряжения ![]() , прикладываемого к контуру намагничивания.
При этом падение напряжения в индуктивности статорной обмотки не оказывает
такого влияния на величину
, прикладываемого к контуру намагничивания.
При этом падение напряжения в индуктивности статорной обмотки не оказывает
такого влияния на величину ![]() , т. к. с уменьшением частоты изменяется также
и его падение напряжения.
, т. к. с уменьшением частоты изменяется также
и его падение напряжения.
Более качественное регулирование скорости обеспечивает закон
регулирования (3.2). Регулирование в соответствии с (3.2) характеризуется
поддержанием потокосцепления статора ![]() . В этом
случае во всем диапазоне регулирования скорости в первой зоне поддерживается
приблизительно постоянная перегрузочная способность.
. В этом
случае во всем диапазоне регулирования скорости в первой зоне поддерживается
приблизительно постоянная перегрузочная способность.
Из схемы замещения
двигателя следует, что условие (3.2) выполняется в том случае, когда
осуществляется компенсация падения напряжения в сопротивлениях статорной
обмотки. Для точного выполнения условия (3.5) требуется векторное сложение
напряжения ![]() и падения напряжения
и падения напряжения ![]() .
.
При построении систем управления векторное сложение можно реализовать во временной области с использованием средств микропроцессорной техники.
Во многих случаях ограничиваются компенсацией падения напряжения
в ![]() от
активной составляющей тока статора.
от
активной составляющей тока статора.
Закон регулирования (3.3) обеспечивает поддержание
результирующего потокосцепления ![]() . Для
его реализации требуется компенсация падения напряжения в полном сопротивлении
статорной обмотки. Такая компенсация непосредственным вводом положительной
обратной связи по полному току с коэффициентом пропорциональности
. Для
его реализации требуется компенсация падения напряжения в полном сопротивлении
статорной обмотки. Такая компенсация непосредственным вводом положительной
обратной связи по полному току с коэффициентом пропорциональности ![]() затруднена
из-за необходимости формирования производных токов статора. Поэтому реализация
закона (3.3) может быть осуществлена лишь за счет создания контура
регулирования потокосцепления
затруднена
из-за необходимости формирования производных токов статора. Поэтому реализация
закона (3.3) может быть осуществлена лишь за счет создания контура
регулирования потокосцепления ![]() .
.
Регулирование скорости в соответствии с (3.4) происходит
при поддержании постоянства потокосцепления ротора ![]() .
.
Качественный вид механических характеристик двигателя, соответствующих рассматриваемым законам регулирования, показана на рис. 3.2.
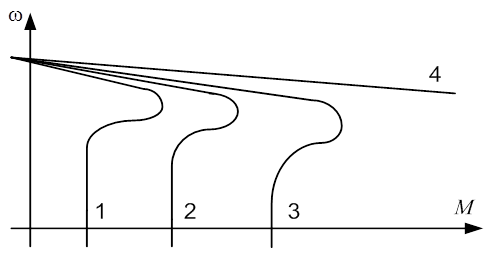
Рис. 3.2. Механические характеристики двигателя
при разных законах регулирования:
1 – реализация (3.1), 2 – реализация (3.2),
3 – реализация (3.3), 4 – реализация (3.4)
При использовании законов регулирования (3.3) и (3.4) перегрузочная способность двигателя превышает этот показатель, соответствующий естественной характеристике двигателя.
3.2. Системы частотного управления
при питании асинхронных двигателей
от автономных инверторов напряжения
К настоящему моменту производители частотно-управляемых электроприводов поставляют на рынок электроприводы, принципы управления которыми можно сгруппировать следующим образом:
– скалярное управление,
– векторное управление,
– прямое управление моментом.
Скалярным принято называть [1] управление, при котором отсутствует или обеспечивается неполная компенсация падения напряжения в статорных цепях. Следовательно, к скалярному способу следует отнести управление согласно закону (3.1) и управление по закону (3.2) при частичной компенсации падения напряжения в сопротивлениях обмоток статора.
В связи со сложностью компенсации полного падения
напряжения ![]() обычно
в системах скалярного управления ограничиваются компенсацией падения напряжения
в сопротивлении
обычно
в системах скалярного управления ограничиваются компенсацией падения напряжения
в сопротивлении ![]() .
При этом обеспечивается скалярная компенсация или падения напряжения от модуля
тока статора
.
При этом обеспечивается скалярная компенсация или падения напряжения от модуля
тока статора ![]() , или
падения от активной составляющей
, или
падения от активной составляющей ![]() того же
тока. В рассматриваемых случаях закон регулирования (3.2) реализуется лишь приблизительно.
того же
тока. В рассматриваемых случаях закон регулирования (3.2) реализуется лишь приблизительно.
При скалярном управлении на основе (3.2) базовым
является закон (3.1), который дополняется компенсацией ![]() или
или ![]() . В этом
случае вместо закона (3.2) реализуется один из следующих:
. В этом
случае вместо закона (3.2) реализуется один из следующих:
 (3.6)
(3.6)
 (3.7)
(3.7)
Векторным частотным называется управление скоростью двигателя при полной (векторной) компенсации падения напряжения в статоре. Следовательно, к системам векторного управления относятся системы, точно реализующие законы (3.6) и (3.7).
В системах с прямым управлением моментом изменение напряжения при изменении частоты не связано какой-либо жесткой зависимостью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.