В данном случае гидромультипликатор представляет собой одноцилиндровый прямодействующий насос без клапанов, соединенный во время хода прессования с рабочим цилиндром пресса. Управление такими гидромультипликаторами осуществляется ручным переключением насоса с помощью четырехходового золотника. Кинематика перемещения рабочего плунжера пресса зависит от кинематики привода мультипликатора и целиком определяется ею. Жидкость высокого давления является упругим звеном между плунжером гидромультипликатора и рабочим плунжером пресса.
Приведенный на рис. 2.2 гидромультипликатор одинарного действия имеет существенные недостатки: подача жидкости прерывистая, а нагнетаемое количество ее ограничивается рабочим объемом цилиндра высокого давления. Для получения высоких давлений при больших объемах цилиндров пресса приходится создавать громоздкие мультипликаторы, которые металлоемки, тяжелы и не обеспечивают необходимых технологических операций в автоматическом режиме.
Для устранения холостого хода, который имеется в мультипликаторах одинарного действия, применяются мультипликаторы двойного действия с автоматическим переключением. Рассмотрим гидросистемы с такими мультипликаторами конструкции авторов.
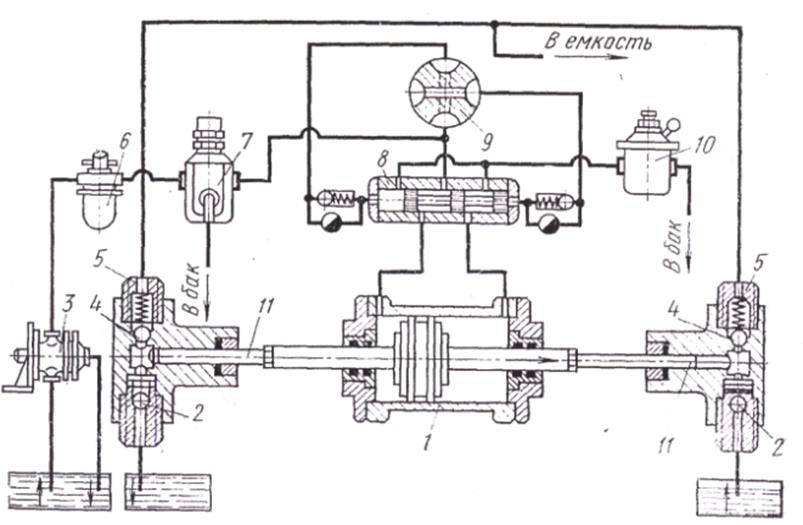
Рис. 2.3. Схема гидросистемы с гидромультипликатором двойного действия.
На рис. 2.3 показана принципиальная схема гидросистемы с
гидромультипликатором двойного действия. Привод гидромультипликатора осуществляется при помощи силового гидроцилиндра 1, поршень которого периодически перемещается в ту или другую сторону, в зависимости от того, в какую полость поступает масло от вспомогательного насоса 3. В качестве вспомогательных в гидросистемах обычно используются лопастные насосы ЛІФ, ЛЗФ, Г12-2 и др., с подачей 5—200 л/мин при давлении 50 кгс/см .
Заполнение жидкостью камер высокого давления обеспечивается через два всасывающих клапана 2, которые во всех гидромультипликаторах выполняются свободно падающими, т. е. без возвратных пружин, но с ограничителями подъема. Последние, как правило, представляют собой стальные шпильки, расположенные поперек всасывающих штуцеров, или объединяются с технологическими заглушками. Нагнетательные клапаны 4 оснащаются возвратными пружинами с ограниченным усилием прижима. Посредством штуцеров 5 и трубопроводов гидромультипликатор соединяется с испытуемой емкостью или исполнительным механизмом.
Жидкость, подаваемая вспомогательным насосом, очищается при помощи щелевого фильтра 6, а заданное давление гидросистемы привода поддерживается предохранительным клапаном 7 типа Р52-1 или БГ54-1. В качестве механизма реверсирования применяется золотник 8 с гидроуправлением; возможно использование золотников типа от Г72-12 до Г72-17. Кинематическая связь рычага крана реверсирования 9 со штоком поршня рабочего цилиндра обеспечивается при помощи регулируемых упоров, позволяющих регулировать ход плунжера. Рычаг и упоры на рис. 3 не показаны. Величина паузы при реверсировании настраивается дросселями, расположенными в торцевых крышках золотника 8.
Суммарный слив масла, отработавшего в рабочем цилиндре, проходит через дроссель 10, обычно типа Г55-2. Автоматический регулятор дросселя стабилизирует число ходов гидромультипликатора независимо от степени нагрузки на плунжерные насосы. Гидросистема привода работает с
постоянным противодавлением, которое колеблется в пределах 8—12 кгс/см .
Плунжеры 11 гидромультипликатора соединяются со штоком при помощи самоцентрирующих устройств. Сопряжение плунжеров с гильзами выполняется по полупрецизионным или прецизионным посадкам в зависимости от рабочего давления гидромультипликатора.
Гидросистема работает следующим образом. При включении привода
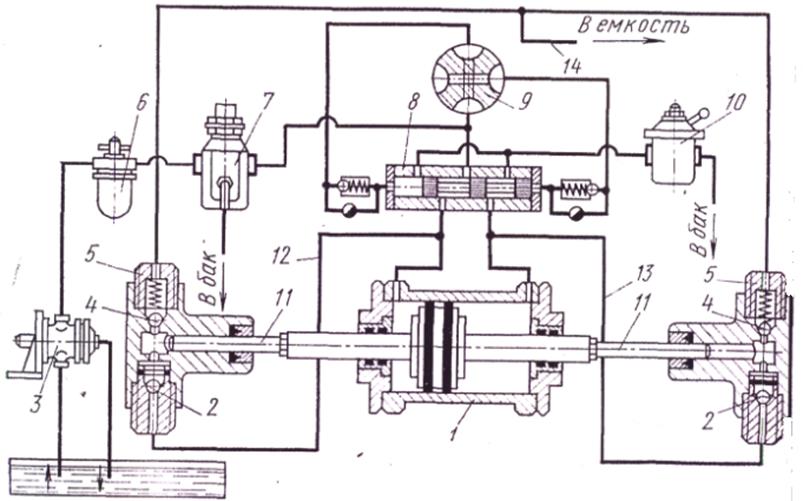
Рис. 2.4. Схема гидросистемы с гидромультипликатором ГМ-500, работающим с циркуляцией клапанов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.