
























Балтийский Государственный
Технический Университет
«Проектированию компьютерных систем управления»
Тема:
«Проектирование алгоритма управления
электрогидравлическим приводом»
Вариант №01
Выполнил: Абрамов И.В.
Группа: P-173
Преподаватель: Пугач
2001г.
Введение
Математическое описание объекта регулирования
Общие положения
Электрогидравлический следящий привод
Выбор периода квантования и построение дискретной модели объекта регулирования
Анализ возможностей системы при использовании пропорционального регулятора.
i Введение
В связи с бурным развитием систем автоматики и робототехники, в последнее время остро возникла необходимость в проектировании простых и надежных систем управления различными механизмами производственного назначения - манипуляторами, рабочими органами станков и т.д. В данном случае, наиболее разумный выход - применение систем на основе мини-ЭВМ, которые получили огромное распространение как за рубежом, так и в нашей стране. В отличие от «жестких» систем, системы с использованием ЭВМ очень удобны при проектировании систем управления в рамках небольшого проекта. Они допускают легкую смену алгоритма управления - для этого нет необходимости что-то изменять в конструкции системы - достаточно поменять программу. Основная задача - разработка алгоритма управления конкретным объектом в рамках конкретной задачи. Эта задача достаточно легко реализуема при современном развитии аналитических методов и средств решения различных задач.
В данной курсовой работе производится выбор алгоритма управления конкретным механическим устройством - электрогидроприводом с помощью пакета MATLAB(R)V.4.0 for Microsoft Windows(C) Copyright 1993, The MathWorks, Inc., который показал высокую эффективность при решении задач подобного класса.
1I Математическое описание объекта регулирования
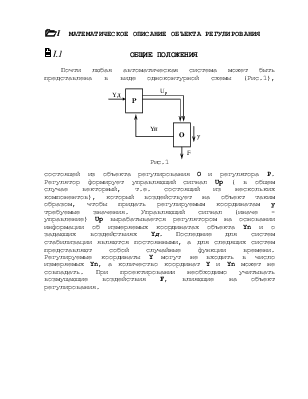
2I.1 Общие положения
 |
2I.2 Электрогидравлический следящий привод
Схема электрогидравлического следящего привода показана на Рис.2.
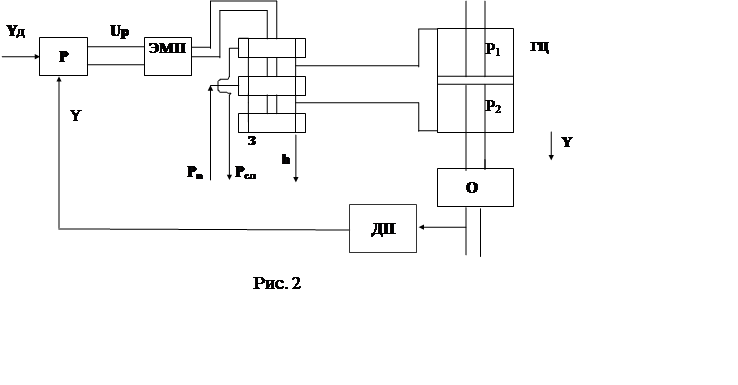 |
Привод предназначен для перемещения инерционного объекта О в соответствии с управляющим сигналом Yg. Исполнительным устройством является гидроцилиндр ГЦ, управляемый золотниковым распределителем 3. При смещении золотника относительно нейтрального (среднего) положения, например вниз, жидкость от источника гидравлического питания под давлением Рn начнет поступать в верхнюю полость гидроцилиндра, вызывая движение поршня вниз. Из нижней полости гидроцилиндра жидкость через открывшуюся золотниковую щель будет выталкиваться на слив. Давление на сливе Рсл условно принято равным нулю. Скорость движения поршня V=y¢(*)в первом приближении пропорциональна смещению золотника h. Нулевым положением для координат y и h считается среднее.
Перемещение золотника осуществляется электромеханическим преобразователем ЭМП и пропорционально управлению Uр : h=Kэмп·Uр
Проектирование ведется по линейной модели, поэтому значение Кэмп на начальных этапах может быть выбрано произвольно, например можно положить Кэмп=1. Уточняется оно на последнем этапе и выбирается таким образом, чтобы не возлагать на управляющего ЭВМ функции усилителя.
Управление Uр формируется на основании информации о задающем воздействии Yд и положении объекта Y. Предполагается, что первое поступает в ЭВМ в виде двоичного кода, а второе подается с цифрового датчика положения ДП. Коэффициент передачи датчика условно принят равным единице. Принцип работы следящей системы состоит в следующем. В простейшем случае управление прямо пропорционально разности между заданным Yg и практическим Y положением объекта. Эта разность Q=Yg-Y есть ошибка или рассогласование следящей системы.
Если, например, Y>Yg , т.е. при принятых направлениях координат объект находится ниже заданного положения, то управление примет отрицательное значение и ЭМП сместит золотник в отрицательном направлении, т.е. вверх. Это, в свою очередь, вызовет движение к уменьшению абсолютной величины рассогласования Q и смещение золотника h . Когда объект дойдет до заданного положения Y=Yg, Q=0, золотник окажется в нейтральном положении и движение объекта прекратится. Разумеется, в реальной системе из-за наличия инерционности, запаздывания и т. п. характер движения будет отличаться от описанного. Могут возникать колебания вокруг заданного положения, а при неудачном выборе коэффициентов передачи система может стать неустойчивой. Именно в связи с этим возникает необходимость выбора более сложных алгоритмов формирования управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.