Требования к перерегулированию в задании на проектирование отсутствуют, в связи с чем границы среднечастотного участка могут быть выбраны до некоторой степени произвольно. Разумеется, этот участок должен иметь наклон -20дб/ден. Для получения приемлемого качества переходного процесса не следует ширину среднечастотного участка выбирать менее 0,3-0,4 (в логарифмическом масштабе) причем частота среза должна располагаться приблизительно в середине этого участка.
Для построения ЛЧХ объекта необходимо найти постоянные времени tп:
tau1=1/aa(1)= 5.591900898034831e-004
tau2=1/aa(2)= 1.500000000000000e-003
tg=tжелаемое=1/5=0,2
По результатам расчетов строим ЖЛЧХ и ЛЧХ объекта.
 |
Из ЖЛАХ находим td=1/wd=1/6.8=0.147.
20lgKж=44,5 => Kж=168 – минимальное значение добавочного коэффициента. Для получения стабильных результатов примем Kж=200.
Далее формируется числитель и знаменатель передаточной функции:
kdob=268
chis1=[tg 1]
chis2=[-tau1 1]
chis3=[-tau2 1]
chis=kdob*conv(chis1,conv(chis2,chis3))
znam1=[1 0]
znam2=[td 1]
znam3=[tau1 1]
znam=conv(znam1,conv(znam2,znam3))
chis = 3.35514e-005 -8.21998e-002 3.95881e+001 2.00000e+002
znam = 7.82866e-005 1.40559e-001 1.00000e+000 0
Переход от Wk(jl) к функции Wk(z) осуществляется с помощью функции MATLAB W2Z:
[N,D]=w2z(chis,znam,t0)
Здесь D, N- векторы коэффициентов полиномов знаменателя и числителя W(z), a DW, NW -соответствующие векторы W(jl) (по убыванию степени).
[n4,d4]=w2z(chis,znam,t0)
n4 =-3.87134e-015 1.16233e+001 1.39901e+001 -2.50617e+001
d4 = 2.97752e+001 -4.53153e+001 2.22475e+000 1.331539e+001
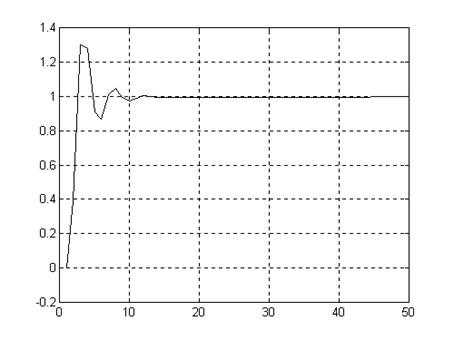
График переходного процесса:
n5=n4
d5=n5+d4
y=dstep(n5,d5,50)
figure(3),plot(y),grid
 |
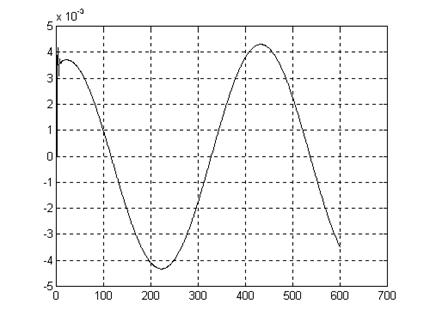
nz1=d4
dz1=d4+n4
uv=ag*sin(wg*t0*i);
tet=dlsim(nz1,dz1,uv);
figure(4),plot(tet),grid
 |
Теперь система удовлетворяет заданным условиям.
Сформированный ЭВМ в соответствии с алгоритмом сигнал управления должен быть выдан в один из портов для последующего цифро-аналогового преобразования.
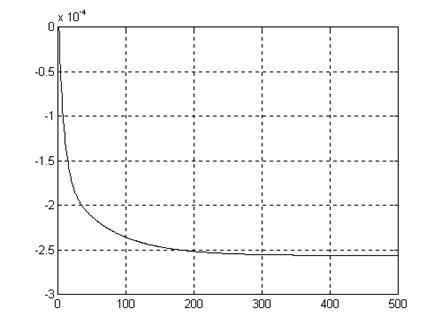
Осталось рассмотреть воздействие Fвн на систему.
chis_f=1000*conv(n2,d4)
znam_f=conv(d2,(d4+n4))
i=500
y=dstep(chis_f,znam_f,i);
 |
Заключение
В процессе выполнения данной курсовой работы мы произвели выбор и расчет алгоритма управление электрогидравлической системой, Выбор производился между системой с пропорциональным управлением и системой с цифровым регулятором. Система с пропорциональным управлением показала свою несостоятельность при решении заданной задачи. При воздействии на систему единичным импульсом, система отрабатывала воздействие нормально в установленное время, но при воздействии синусоидальным сигналом с заданной частотой и амплитудой погрешность отработки входного воздействия погрешность превышала заданные пределы.
Система с цифровым регулятором, более сложная, позволила решить поставленную задачу в полном объеме - как при отработке входного единичного воздействия, так и при воздействии синусоидальным сигналом с заданной амплитудой и частотой.
Общее время, потраченное на выполнение данной курсовой работы - не более 12 часов, не считая времени на оформление данного документа. При этом, разработанная методика позволяет без труда рассчитывать аналогичные системы с другими параметрами. Это подтверждает высокую эффективность систем управления с применением ЭВМ, и их экономическую оправданность в рамках небольших предприятий или проектов.
Список использованных источников
1. MATLAB(R) Version 4.0 and SIMULINK(TM) Version 1.2c for Microsoft Windows.
2. Advanced Grapher 1.62 Copyright (c) 1998-2000
3. Комплекс автоматизированного проектирования MATLAB-CTRL: Учеб. пособие / И.Л.Коробова, Ю.В.Загашвили; Балт. гос. техн. ун-т. СПб.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.