Объект регулирования, в трактовке схемы рис.1, в электрогидравлическом следящем приводе состоит из ЭМП, золотникового механизма и управляемого им гидроцилиндра, шток которого жестко связан с перемещаемым инерционным объектом, и датчика положения. Математическое описание объекта регулирования состоит из уравнений его элементов, записанных на основании физических законов, характеризующих их функционирование, а также из уравнений связи. В совокупности они образуют систему уравнений объекта.
Электромеханический преобразователь в самом грубом приближении описывается уравнением:
h=КэмпUp (1.1)
Такое упрощенное описание предполагает, что ЭМП является безынерционным элементом и не вносит запаздывания. Это допущение, строго говоря, справедливо только для приводов малой мощности.
Сколько-нибудь строгое математическое описание золотникового механизма и управляемого им гидроцилиндра представляет собой систему нелинейных дифференциальных уравнений. Для выполнения анализа в первом приближении эту систему линеаризуют методом малых отклонений. Такая линеаризация заключается в разложении нелинейных функций в ряд Тейлора в окрестности некоторого номинального режима с удержанием только линейных членов. В данном конкретном случае за номинальный принимают режим, когда h=h°=0 (среднее положение золотника), y=y°=0 (среднее положение поршня) и P=P1-P2=0, P1 и P2 - давления в верхней и нижней полости цилиндра. Т.е. за номинальные приняты средние значения диапазона изменения переменных. При этом отклонения от номинальных значений совпадает с самими переменными: Dh=h-h°=h и т.д.
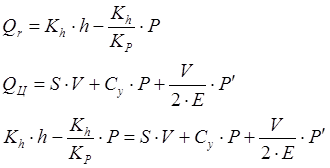
Первое из давлений, описывающих систему “золотник - цилиндр” называется уравнением расхода и является математическим отображением условия неразрывности потока жидкости:
Qз = Qц
Qз - подача жидкости через золотниковый механизм;
Qц - расход жидкости в гидроцилиндре.
В линеаризованной форме
 (1.2)
(1.2)
|
Kh |
крутизна расходной характеристики золотника, т.е. коэффициент пропорциональности между подачей жидкости через золотник и его смещение от среднего положения |
|
Kp |
крутизна силовой характеристики золотника - зависимость перепада давлений P в гидроцилиндре с заторможенным поршнем от смещения золотника |
|
Sn |
эффективная площадь поршня |
|
y¢ |
скорость поршня |
|
V |
скорость поршня |
|
Cy |
коэффициент утечек |
|
V |
объем одной полости гидроцилиндра (с учетом объема подводящего трубопровода) при среднем положении поршня |
|
E |
модуль объемной упругости жидкости |
Физический смысл слагаемых уравнения (1.2.) следующий:
Первое слагаемое левой части - это подача идеального золотникового механизма на холостом ходу, т.е. при отсутствии перепада давления в гидроцилиндре. Второе слагаемое левой части показывает уменьшение подачи золотника при появлении перепада давления в цилиндре. Оно возникает из-за перепада давления на золотниковых щелях. Первое слагаемое правой части - “полезный” расход, обеспечивающий движение поршня. Второе слагаемое - расход перетечек жидкости из полости высокого в полость низкого давления, неизбежный во всяком реальном гидродвигателе. Наконец, третье слагаемое правой части - это так называемый компрессорный расход: изменение объема жидкости при изменении давления, являющееся следствием довольно значительной ее сжимаемости.
Второе уравнение, описывающее систему “золотник - цилиндр” называется уравнением давлений. По сути это уравнение баланса сил на штоке гидроцилиндра. В линейной форме оно имеет вид:
Sn·P= m·V¢+ fV + Fвн (1.3.)
m -масса всех подвижных частей, связанных со штоком;
f - коэффициент вязкого трения;
Fвн - внешнее возмущающее усилие, в общем случае являющееся случайной функцией времени.
Датчик положения будет считать безынерционным, и его выход отождествлять с положением нагрузки y.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.