В системе стабилизации ошибка формируется как разность между постоянной установкой, соответствующей заданному значению температуры, и выходом датчика температуры. Установка может хранится в памяти машины, либо приходить в один из портов ЭВМ более высокого иерархического уровня.
Сформированный ЭВМ в соответствии с алгоритмом (4.3) сигнал управления должен быть выдан в один из портов для последующего цифро-аналогового преобразования.
1III Выполнение работы
по индивидуальным данным
2III.1 Исходные данные
Данные объекта Требования к системе
|
E |
= |
109 Па |
tp |
= |
0,15 c |
|
hо |
= |
0,95 - |
qдоп |
= |
5*10-3 м |
|
r |
= |
900 кг/м3 |
Ag |
= |
0,2 м |
|
s |
= |
30*10-6 м |
wg |
= |
5 c-1 |
|
D |
= |
0,04 м |
Fвн |
= |
1*103 Н |
|
Рн |
= |
6 MПа |
|||
|
L |
= |
0,2 м |
|||
|
m |
= |
0,5*103 кг |
|||
|
hmax |
= |
0.001 м |
|||
|
b |
= |
0,03 м |
|||
|
m |
= |
0,7 - |
|||
|
Kш |
= |
0.4-0.6 - |
2III.2 МаТематическое описание системы




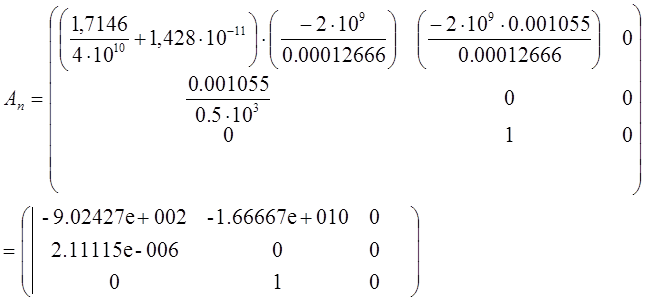
V @ 0,6*SП*L = 0,6*0,00105557*0,2 = 1.266690e-004
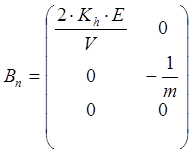
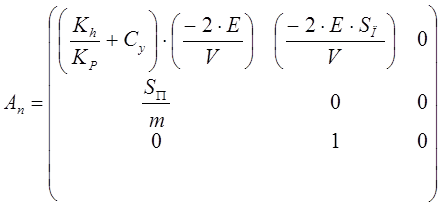
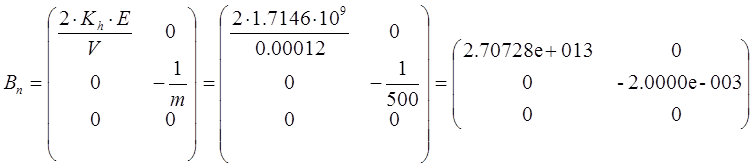
Матрицы уравнения состояния системы:
С= (0 0 1)
D= (0 0)
С= (0 0 1)
D= (0 0)
Произведем выбор периода квантования системы:
 c.
c.
Далее, находим полюса передаточной функции непрерывной части, что делается с помощью функции MATLAB SS2ZP:
[z,p,k]=ss2zp(An,Bn,Cn,Dn,1)
Вектор Рн составлен из полюсов передаточной функции непрерывной части.
0
p = -4.083833156234613e+001
-8.615885217173716e+002
Дискретная модель объекта может быть задана в форме системы разностных уравнений состояния: X(k+1)=AX(k)+BU(k). Матрицы А и В могут быть определены с помощью функции C2D:
[Ad,Bd]=c2d(A, B, То)
3.514647016430293e-002 -1.643374807358630e+007 0
Ad= 2.081646694267021e-009 9.249601075440594e-001 0
4.502393548497771e-012 2.910602763701082e-003 1
2.669446001057125e+010 7.108910605044431e+001
Bd= 1.218924252659323e+002 -5.821205527402160e-006
1.452140400082277e-001 -8.850959103963462e-009
Передаточные функции находятся для каждого входа отдельно с помощью функции SS2TF: [NiV,DiV]=ss2tf(Ad,Bd,C,D,iv), где iv - номер входа.
Для 1-го входа:
N1 = 0 1.45214e-001 3.35548e-001 3.87678e-002
D1 = 1 -1.96010e+000 1.02682e+000 -6.67183e-002
Для 2-го входа:
N2 = 0 -8.85095e-009 -8.12528e-009 5.70355e-010
D2 = 1 -1.96010e+000 1.02682e+000 -6.67183e-002
2III.3 Анализ системы
при использовании пропорционального регулятора
Пропорциональный регулятор является простейшим из возможных. Алгоритм управления имеет вид:
Up=-KpYu
Кр - постоянный коэффициент,
Yu- измеряемая координата.
Для электрогидравлического привода Yu=y,
Величину Кр будем определять подбором, для чего воспользуемся функцией RLOCUS, которая ищет корни характеристического уравнения 1+kpWu=0
Обращение к функции имеет вид R=RLOCUS(N,D,К),
N и D - векторы коэффициентов числителя и знаменателя передаточной функции Wu, а К - вектор значений коэффициентов Кр, при которых ищутся корни характеристического уравнения.
В нашем случае:
k=0,001:0.01:0.25
r=rlocus(N1,D1,k)
...
...
9.3549e-001+ 3.2617e-001i 9.3549e-001- 3.2617e-001i 6.0074e-002
9.3511e-001+ 3.3433e-001i 9.3511e-001- 3.3433e-001i 5.9396e-002
9.3472e-001+ 3.4229e-001i 9.3472e-001- 3.4229e-001i 5.8726e-002
r= 9.3432e-001+ 3.5006e-001i 9.3432e-001- 3.5006e-001i 5.8063e-002
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.