-форма ЖЛЧХ, особенно в
высокочастотной части, должна по возможности повторять форму ЛЧХ передаточной
функции Wu(jl). Наклоны высокочастотных асимптот должны
совпадать обязательно.![]()
По построенному графику
амплитудной ЖЛЧХ необходимо восстановить передаточную функцию Wu(jl). Переход от амплитудной характеристики к
передаточной функции вообще говоря неоднозначен. Например, передаточные функции
 и имеют одинаковые
амплитудные ЛЧХ.
и имеют одинаковые
амплитудные ЛЧХ.
Обязательно выполнение следующего правила: передаточная функция Wж(jl) должна иметь те же номинальнофазовые нули, т.е. те же сомножители числителя, в которых есть отрицательные слагаемые, которые имеются в передаточной функции Wu(jl). Несоблюдение этого условия приводит к практической неработоспособности системы.
После того, как передаточная функция Wж(jl) получена, передаточная функция Wk(jl), соответствующая алгоритму управления, находится простым делением

Если в числителе и в знаменателе Wk(jl) окажутся сомножители с постоянными времени, отличающимися не более чем на 20 %, их допустимо сократить.
Переход от Wk(jl) к функции Wk(z) осуществляется с помощью функции MATLAB Z2W
[D,N]=Z2W(DW,NW,T0).
Здесь D, N- векторы коэффициентов полиномов знаменателя и числителя W(z), а DW, NW -соответствующие векторы W(jl) (по убыванию степени) Векторы D и N вычисляются с точностью до одного постоянного множителя, который следует сократить.
Метод ЛЧХ является приближенным, поэтому необходимо проверить качество переходного процесса и точность системы, достигаемую при алгоритме управления, описываемом функцией Wk(z). Эта проверка подробно рассмотрена в п.3. В формуле (3.4) и всех последующих необходимо произведение КрWu(jl) заменить на произведение Wk(z)* Wu(z)= W(z). В остальном рассчет не отличается от описанного. Графики должны быть представлены в записке. До начала расчета необходимо сократить общие множители числителя и знаменателя W(z), если они имеются.
Для следящей системы, кроме того, необходимо оценить установившуюся ошибку от постоянного возмущающего воздействия. Для этого необходимо сформировать функцию
FФF(z)=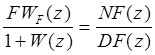
где F- значение возмущающего воздействия из задания, а затем воспользоваться функцией DSTEP.
Если проверка дала
удовлетворительные результаты, можно переходить к реализации алгоритма
управления, для чего необходимо записать этот алгоритм в явной форме. Ресурсы
управляющей ЭВМ используются наиболее рационально, если коэффициент передачи
функции Wk близок к единице. Для
выполнения этого условия в аналоговой части системы вводят дополнительные
усилительные элементы с коэффициентом Кдоп (вопросы реализации не
рассматриваются), а в ЭВМ реализуют алгоритм, соответствующий функции 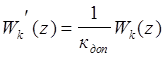 . Для электромеханической следящей системы
. Для электромеханической следящей системы  объяснение этому дано ниже.
объяснение этому дано ниже.![]() Передаточную функцию Wu’ нужно представить в форме
Передаточную функцию Wu’ нужно представить в форме

Отсюда U(z)+a1U(z)z+a2U(z)z2+...= b0q(z)+b1q(z)z-1+b2q(z)z-2+...
и U(z)=b0q(z)+b1q(z)z-1+...- a1U(z)z-1-a2U(z)z2...
Поскольку домножение z-изображения решетчатой функции на z-n соответствует ее сдвигу на n тактов квантования, из последнего выражения непосредственно получается алгоритм
U(k)=b0q(k)+b1q(k-1)+...- a1U(k-1)-a2U(k-2)... (4.3)
Сигнал ошибки в различных системах формируется различным образом , в связи с чем возникают особенности в реализации алгоритма.
В электрогидравлической следящей системе этот сигнал (q=yg-y) должен быть сформирован в управляющей ЭВМ. Предполагается, что в один из портов ЭВМ подается код, соответствующий управляющему сигналу yg, а другой порт принимает сигнал y от цифрового датчика положения.
В электромеханической следящей системе сигнал от
чувствительного элемента, равный UB*q
поступает через АЦП в один из портов ЭВМ. Коэффициент UB необходимо учесть, для чего
перед получением алгоритма на него следует поделить полученную функцию Wu(jl). ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.