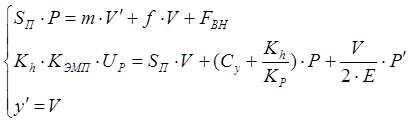
Таким образом, объект регулирования описывается уравнениями(1.1.)¸(1.3.)и кинематическим соотношением y¢=V
Целесообразно объединить уравнения (1.1.) и (1.2.) и получить математическое описание объекта в виде системы дифференциальных уравнений первого порядка:
 (1.4)
(1.4)
Для дальнейших преобразований систему (1.4.) необходимо привести к канонической форме уравнений состояния. Объект имеет два входных воздействия - управляющее Up и возмущающее Fвн - которые должны составить вектор - столбец входных сигналов U. Координаты объекта - давление P, скорость V и перемещение y -составят вектор координат X. Выход объекта Y совпадает с соответствующей координатой. Переход от (1.4.) к системе уравнений состояния вида
X¢=AnX + BnU (1.5.)
y= Cx+Du (1.6.)
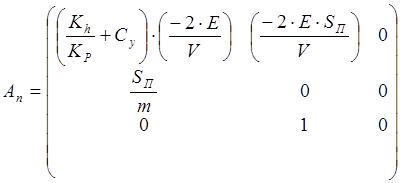

Cп = (0 0 1); Dп = (0 0)
Численные значения коэффициентов уравнений (1.1.)¸(1.3.) частично приведены в задании на проектирование. Другие могут быть рассчитаны в соответствии с приведенными ниже указаниями. Коэффициент Кэмп, как уже было сказано, можно на первом этапе принять равным единице.
Крутизна расходной
характеристики Kh определяется по формуле  . Ширина щели b и
давление питания Рn заданы. Коэффициент расхода m =0,7 , плотность рабочей
жидкости r@900 кг/м3 .
. Ширина щели b и
давление питания Рn заданы. Коэффициент расхода m =0,7 , плотность рабочей
жидкости r@900 кг/м3 .
Крутизну силовой
характеристики находят по полуэмпирической формуле  . Здесь d
- радиальный зазор в золотниковой паре, d = 5 ¸
25 мкм.
. Здесь d
- радиальный зазор в золотниковой паре, d = 5 ¸
25 мкм.
Эффективная площадь поршня рассчитывается по очевидной
формуле: 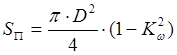 , где Кш = dш/Dn -
отношение диаметра штока к диаметру поршня, Кш =0,4¸ 0,6.
, где Кш = dш/Dn -
отношение диаметра штока к диаметру поршня, Кш =0,4¸ 0,6.
Коэффициент утечек находят
исходя из объемного КПД hо=0,96¸0,98, давления питания Pn
и номинальной подачи Qн. Последнюю можно
определить из выражения Qн = Kh·hmax, где hmax
- максимальное смещение золотника. Расчетная формула для коэффициента утечек: 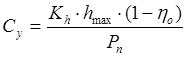
Объем жидкости в полости цилиндра вычисляется ориентировочно : V@0,6·Sn·L, L - полный ход поршня.
Значение модуля объемной упругости E@ 109 Н/м2.
1II Выбор периода квантования и построениедискретноймодели объекта регулирования
При использовании цифровой коррекции к объекту регулирования, кроме непрерывной неизменяемой части, относят также цифроаналоговый преобразователь, модель которого представляют в виде идеального импульсного элемента и фиксатора нулевого порядка. Условно считается, что измерение выходных координат происходит только в моменты времени, кратные периоду квантования То. Схема объекта регулирования в цифровой системе может быть представлено в виде рис.2.1
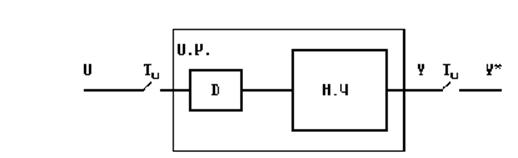
Рис.3
На рисунке 3 обозначено: Ф- фиксатор нулевого порядка, Н.Ч- непрерывная часть (объект), математическое описание которого получено в предыдущем разделе.
Период квантования То может быть либо задан исходя из возможностей ЭВМ, либо рассчитан на основании требований к длительности переходного процесса tр. Для расчета используется неравенство То<tp/(1-2)P, которое рекомендуется выполнять с запасом в 4-10 раз.
Кроме того, к нежелательным эффектам может привести близость периода квантования к постоянным времени колебательных звеньев непрерывной части (если таковые имеются). Необходимо найти полюса передаточной функции непрерывной части, что делается с помощью функции MATLAB
[Zн,Pн,Kн]=SS2ZP(Aн,Bн,C,D,iv)
Здесь Aн,Bн,C,D- матрицы из системы (5)(6), iv- номер входа управляющего воздействия.
Вектор Рн будет составлен из полюсов передаточной функции непрерывной части. При наличии колебательного звена вектор Рн содержит пару комплексно-сопряженных полюсов - α+jβ. Постоянная времени колебательного звена Тк находится по формуле
-1/2
Тк=( α 2+β2)
Вектор Рн не должен иметь составляющих с положительной вещественной частью. Их наличие говорит об ошибке в расчетах.
Дискретная модель объекта может быть задана в форме системы разностных уравнений состояния
X(k+1)=AX(k)+BU(k) (2.1)
y(k)=CX(k)+DU(k), (2.2)
где X(k),y(k),U(k)- дискретные аналоги непрерывных переменных из (1.5), (1.6).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.