Матрицы А и В связаны с матрицами Ан, Вн непрерывной модели соотношениями
А=ехрАнТо То
В=Вн∫ ехрАн t dt
0
Определяются эти матрицы с помощью функции MATLAB [А,В]=С2d(Ан,Вн,То).
Другой способ задания дискретной модели- описание объекта с помощью передаточных функций с использованием z-преобразования.
В следящей системе объект регулирования имеет единственную выходную величину y (перемещение или угол поворота инерционного объекта) и два входных воздействия i (компоненты вектора U)- управление (Uр) и возмущение (Mпр или Fвн). Он будет полностью описываться двумя передаточными функциями
Y(z) Y(z) Y(z)
WU(z)=----- WF(z)=----- WM(z)=----Up(z) F(z) M(z)
Его структурная схема имеет вид, рис.4
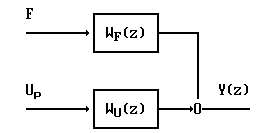
Рис.4
Каждую из этих передаточных функций можно представить в форме отношения полиномов
N(z) bnzn+...+b1z+bo
W(z) = ----- = ------------------------------- (2.3)
D(z) anzn+...+a1z+ao
либо в виде отношения произведений элементарных сомножителей
(z-z1)(z-z2)...(z-zn)
W(z) = K--------------------- (2.4)
(z-p1)(z-p2)...(z-pn)
1III Анализ
возможностей системы при
использовании пропорционального регулятора.
Пропорциональный регулятор является простейшим из возможных. Алгоритм управления имеет вид:
Uр=-Крyu, где ур- постоянный коэффициент, а yu - измеряемая координата. Для электрогидравлического привода yu=y, для электромеханического привода у=UВу, а для системы стабилизации yu=y1. В динамических расчетах можно условно положить Ub=1, а реальное значение этого коэффициента (обычно Ub=30-110 В) необходимо будет учесть на последнем этапе проектирования при реализации алгоритма управления. Структурная схема системы с пропорциональным регулятором имеет вид рис.5.
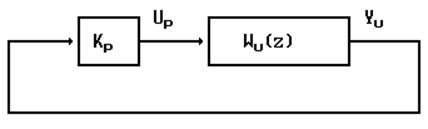
Рис.5
Значение коэффициента Кр должно удовлетворять условиям замкнутой системы:
Кр < Kкр
где Ккр то значение Кр, при котором система теряет устойчивость. В некоторых случаях неравенство может оказаться двусторонним:
Ккр1 < Кр < Ккр2
Величину Кр можно выбрать либо аналитически, определяя Ккр по критериям устойчивости, либо определить подбором.
Простейший способ аналитического определения значения Ккр состоит в следующем. В передаточной функции Wu(z) переходят к w-преобразованию. Это делается с использованием функции MATLAB-CTRL W2Z, обращение к которой имеет вид:
[DW,NW]= W2Z(D,N,To)
Здесь D и N- векторы коэффициентов полиномов знаменателя и числителя передаточной функции Wu(z), расположенных по убыванию степени z, а То- период квантования. Результатом операции будут векторы коэффициентов полиномов DW и NW знаменателя и числителя передаточной функции
NW(w)
Wu(w)=--------DW(w)
Характеристическое уравнение системы имеет вид 1+KpWu(w)=0, или в развернутой форме
DW(w)+KpNW(w)=0 (3.1)
Поскольку во всех рассматриваемых случаях объект описывается передаточными функциями третьего порядка, приводя в (3.1) подобные, можно представить характеристическое уравнение в форме
a3(Кp)w3+a2(Кp)w2+a1(Кp)w+a0(Кp)=0
Согласно критерию Гурвица, условие устойчивости системы записывается в форме а1а2>а0а3 и, следовательно, значение Ккр находится из уравнения
a1(Ккр)a2(Ккр)=a0(Ккр)a3(Ккр) (3.2)
После решения этого уравнения, величину Ккр выбирают равной Кр=(0.7-0.9)Ккр с целью обеспечения некоторого запаса устойчивости.
Если исполнитель хочет избежать аналитических расчетов, связанных с решением (3.2), то приемлемое значение Кр можно найти подбором. Это делается с помощью функции MATLAB-CTRL RLOCUS, которая ищет корни характеристического уравнения
1+kpWu=0 (3.2)
Обращение к функции имеет вид R=RLOCUS(N,D,K), где N и D- векторы коэффициентов числителя и знаменателя передаточной функции Wu, а K- вектор значений коэффициентов Кр, при которых ищутся корни характеристического уравнения. Он обычно формируется в виде:
К=Кр нач Δ: Kр:Кр кон
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.