Если
![]() , то возможны два случая:
, то возможны два случая: ![]() меняет знак на отрезке [x1; xM] (
меняет знак на отрезке [x1; xM] (![]() ) или на отрезке [xM; x2] (
) или на отрезке [xM; x2] (![]() ). Выбирая в каждом
случае тот из отрезков, на котором
). Выбирая в каждом
случае тот из отрезков, на котором ![]() меняет знак, и,
продолжая процесс половинного деления по зависимости (9) дальше (т.е. принимая
меняет знак, и,
продолжая процесс половинного деления по зависимости (9) дальше (т.е. принимая ![]() или
или ![]() ), можно
дойти до сколь угодно малого отрезка, содержащего корень.
), можно
дойти до сколь угодно малого отрезка, содержащего корень.
Итерационный процесс прекращается при выполнении условия
где ε – заданная точность решения уравнения.
Метод
хорд. Аналогичен методу дихотомии, но
в качестве приближения к корню уравнения принимаем значение ![]() точки пересечения хорды, проведенной через
точки
точки пересечения хорды, проведенной через
точки ![]() и
и ![]() , с осью
абсцисс:
, с осью
абсцисс:
 (11)
(11)Условие
прекращения итерационного процесса аналогично (10), только вместо значения ![]() подставляется
подставляется ![]() .
.
Метод
Ньютона. Отличие от предыдущего метода
состоит в том, что на каждой итерации вместо хорды проводится касательная к
кривой ![]() в точке
в точке ![]() (где
(где ![]() – начальное приближение к значению корня)
и ищется точка пересечения касательной с осью абсцисс. Полученное при этом
значение
– начальное приближение к значению корня)
и ищется точка пересечения касательной с осью абсцисс. Полученное при этом
значение ![]() используется в качестве начального приближения
на следующей итерации, т.е.
используется в качестве начального приближения
на следующей итерации, т.е. ![]() . Общая формула имеет
вид
. Общая формула имеет
вид
 (12)
(12)где ![]() – значение производной в точке
– значение производной в точке ![]() .
.
Итерационный процесс прекращается при выполнении условия
В
качестве начального приближения на первой итерации можно принять середину
отрезка [a; b], т.е. ![]() .
.
Ниже приведен текст программы на языке Паскаль.
Program RU1OK;
{ Решение уравнений с одной переменной.
Метод отделения корней }
Vara,b,a1,b1,h:real;
Function F(x:real):real;
begin
F:=x-10*sin(x);
end;
begin
write ('Интервал поиска корней a,b=,
шаг отделения корней h=');
readln (a,b,h);
a1:=a; b1:=a1+h;
while b1<=b do
begin
if F(a1)*f(b1)<=0 then
writeln('Корень принадлежит области ',a1:7:4,
' ',b1:7:4);
a1:=b1;
b1:=a1+h;
end;
readln;
end.
ProgramRU1D;
{ Решение уравнений с одной переменной.
Методдихотомии}
Const E=0.0001;
Var a,b,x1,x2,xc:real; { xc = xM }
Function F(x:real):real;
begin
F:=x-10*sin(x);
end;
begin
write ('Интервал поиска корня a,b=');
readln (a,b);
x1:=a; x2:=b;
xc:=(x1+x2)/2;
while abs(F(xc))>E do
begin
if F(xc)*F(x2)<=0 then x1:=xc else x2:=xc;
xc:=(x1+x2)/2;
end;
writeln('Корень=',xc:7:4);
readln;
end.
ProgramRU1hord;
{ Решение уравнений с одной переменной.
Методхорд}
Const E=0.0001;
Var a,b,x1,x2,xc:real; { xc = xH }
Function F(x:real):real;
begin
F:=x-10*sin(x);
end;
begin
write ('Интервал поиска корня a,b=');
readln (a,b);
x1:=a; x2:=b;
xc:=x1-(x2-x1)/(F(x2)-F(x1))*F(x1);
while abs(F(xc))>E do
begin
if F(xc)*F(x2)<=0 then x1:=xc else x2:=xc;
xc:=x1-(x2-x1)/(F(x2)-F(x1))*F(x1);
end;
writeln('Корень=',xc:7:4);
readln;
end.
ProgramRU1Nuton;
{ Решение уравнений с одной переменной.
Метод Ньютона }
ConstE=0.0001;
dx=0.0001;
Var a,b,x0,x,Fpr:real; { x = xN }
n:integer;
Function F(x:real):real;
begin
F:=x-10*sin(x);
end;
begin
write (' Начальное приближение a=');
readln (a);
x:=a;
n:=0;
repeat x0:=x;
n:=n+1;
if n>30000 then halt;
Fpr:=(F(x0+dx/2)-F(x0-dx/2))/dx;
x:=x0-F(x0)/Fpr
until abs(x-x0)<E;
writeln('Корень=',x:7:4);
readln;
end.
Задание 4
Задание 4 имеет учебной целью закрепление пройденного материала по теме «Линейные системы и методы решения. Прямые методы. Метод Гаусса».
Условие задания 4. Решить систему трех линейных алгебраических уравнений
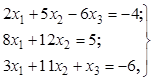
методом Гаусса.
Алгоритм выполнения задания. Метод Гаусса состоит из двух этапов.
1. Прямой
ход. Преобразовываем матрицу системы к треугольному виду путем последовательного
исключения неизвестных из уравнений. Последовательное исключение выполняется ![]() раз, где
раз, где ![]() – количество уравнений системы. Общие зависимости для нахождения коэффициентов
преобразованных матриц имеют вид
– количество уравнений системы. Общие зависимости для нахождения коэффициентов
преобразованных матриц имеют вид
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.