8.4. МОДЕЛИРОВАНИЕ И ИСПЫТАНИЕ
До этого момента в процессе внедрения робота он сам еще не был приобретен. С покупкой его можно подождать еще некоторое время. Известно, что более или менее твердый выбор робота был сделан в конце фазы планирования. Результаты этого выбора были частично использованы при разработке захвата и соответствующих установочных приспособлений. Сам же робот понадобится на стадиях моделирования и испытания, но и на этих стадиях можно обойтись без его приобретения. Сначала необходимо создать испытательный стенд.
Испытательный стенд. Большинство промышленных роботов взаимодействуют с другим технологическим оборудованием, которое может оказаться слишком массивным, очень дорогим и слишком необходимым для осуществления существующего процесса, чтобы использовать его в испытательном стенде. Однако только часть каждой технологической установки необходима, чтобы испытать работоспособность внедряемого комплекса. Поэтому разумно изготовить модель или просто макет каждой установки, воплощающий только важнейшие ее черты. На рис. 8.5 изображена скелетная модель автоматической установки для намотки роторов электродвигателей, изготовленная на заводе компании «Зингер». Предполагалось осуществить роботизацию двух имеющихся в производстве установок, но ни одну из них нельзя было изъять из производства на время испытания. Единственным элементом намоточной установки, представлявшим интерес во время испытаний, было установочное приспособление, на котором помещались роторы. Поэтому, как показано на рис. 8.6, для испытательного стенда потребовалась простая рама для закрепления приспособления.
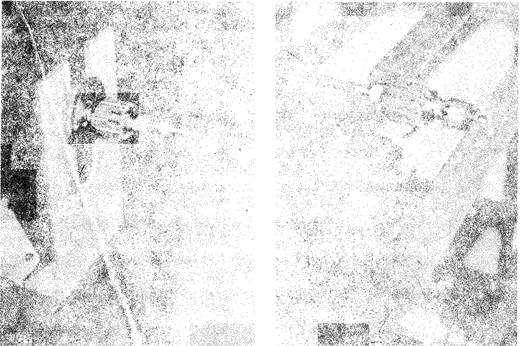
Рис. 8.5
Скелетная модель установочного приспособления автоматической установки для намотки роторов электродвигателей. Модель применялась при проверке возможности использования робота для загрузки и разгрузки установки. Справа показана имитация места установки детали на конвейере
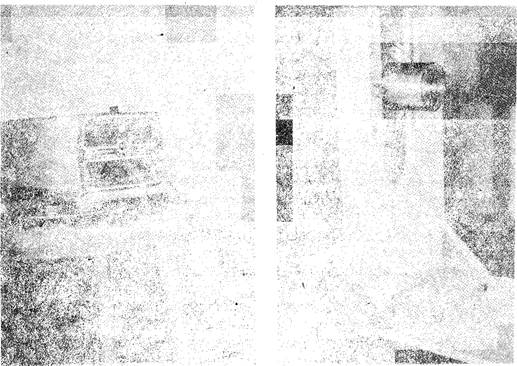
Рис.8.6
Применение лазера для контроля положения скелетной модели, установленной на испытательном стенде
Датчики и исполнительные механизмы. Промышленный робот редко работает самостоятельно без какого-либо взаимодействия со связанными с ним процессами. Концевые и путевые выключатели, фотоэлементы и другие датчики процессов должны быть предусмотрены в качестве датчиков входных сигналов для робота с тем, чтобы робот мог синхронизировать свои движения с процессом или изделием, которое он обслуживает. И наоборот, робот может передать процессу выходной сигнал, обусловливающий начало какой-либо функции. Наличие таких входных и выходных сигналов характерно не только для роботов, предназначенных для переноски и манипулирования деталями. Роботы для окраски, сварки и сборки также нуждаются в входных и выходных сигналах. Принципиально этот вопрос решается раньше, на стадии планирования, но выбор устройств для реализации продолжается. и во время моделирования системы. Как выполняются логический анализ входных и выходных сигналов и управление соответствующими устройствами робота (обычно с помощью программируемых контроллеров), рассмотрено в гл. 10—12. Функционирование приборов, обеспечивающих входные и выходные сигналы, может быть проверено при помощи устройств программного управления еще до приобретения самого робота.
Испытания робота. Для проведения экспериментов и подтверждения пригодности на испытательный стенд должен быть установлен настоящий робот. Если фирма уже имеет в эксплуатации подобный робот, его, вероятно, можно временно включить в состав экспериментального стенда. Идя на это, необходимо учесть возможные последствия перебоев в производственном процессе, связанных с изъятием из производства работающего робота.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.