Сложность кинематических схем различна для универсальных, специализированных и специальных станков. Так, в специальных станках кинематические просты и обеспечивают одну – две скорости перемещения исполнительных органов.
В универсальных станках кинематические схемы сложны, что связано с весьма широкими технологическими возможностями таких станков. Эти возможности должны обеспечить обработку любого размера внутри заданного интервала в широком диапазоне скоростей главного движения и подач. Диапазон скоростей главного движения может быть представлен в виде диапазона частот вращения шпинделя.
Таким образом, технологические возможности станка могут быть охарактеризованы диапазоном регулирования частот вращения шпинделя, представляющим собой отношение предельных частот вращения. С увеличением частоты вращения шпинделя возрастают технологические возможности станка.
Разнообразие режимов обработки резанием предполагает обеспечение станком любой требуемой частоты вращения шпинделя. Это условие в полной мере выполнимо при использовании бесступенчатого регулирования в кинематической цепи привода шпинделя. В тоже время устройства бесступенчатого регулирования (механические или электрические) сложны и дороги, а потому используются только в экономически оправданных случаях. Большинство станков общего назначения (без систем ЧПУ) оснащают более простыми устройствами ступенчатого регулирования, которые выполняют в виде коробок скоростей либо гитар сменных колес.
Основой для разработки кинематической схемы станка является полученная структурная схема. Условные кинематические связи, выполненные пунктирными линиями (соответственно участок 9 – 10 и 7 – 8), на структурной схеме необходимо заменить реальными механизмами , последовательно соединёнными в кинематические цепи. Кинематические цепи 9 – 10 и 7 – 8 являются составными элементами соответственно привода подач и привода гавного движения.
Механизм движения согласно виду структурной схемы должен содержать двигатель Д,
реверсивный механизм Р и орган настройки iv
. Орган настройки iv согласно заданию на курсовую работу должен быть
представлен коробкой скоростей, имеющей структурную формулу ![]() , т.е. содержащей две группы передач и
обеспечивающей получение восьми ступеней вращения шпинделя n1 – n8.
, т.е. содержащей две группы передач и
обеспечивающей получение восьми ступеней вращения шпинделя n1 – n8.
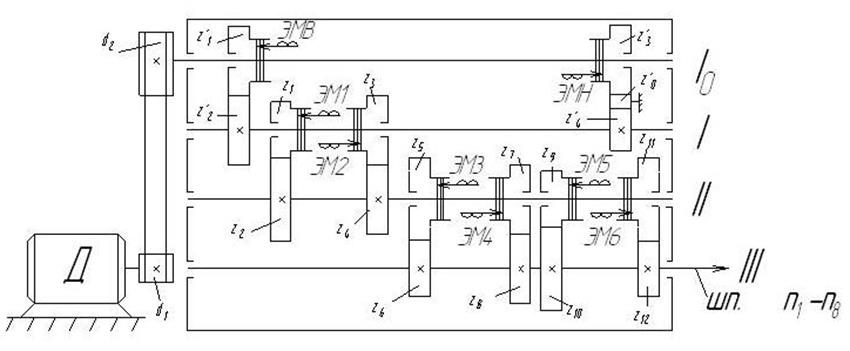
Рис. 3.1. Кинематическая схема станка
Отражая общую тенденцию станков I-й группы, реверсивный механизм размещаем в коробке скоростей. Реверсивный механизм также базируется на применении электромагнитных муфт соответственно ЭМВ для прямого и ЭМН – обратного ходов.
В качестве источника движения принят электродвигатель Д. Для передачи вращения от двигателя к коробке скоростей используется клиноременная передача со шкивами d1d2.
Таким образом, получена кинематическая схема привода главного движения, обеспечивающего согласно заданию восемь ступеней вращения шпинделя:
Учитывая, что основным содержанием курсовой работы является расчет привода главного движения, механизм привода подач представляют упрощенной схемой. Некоторые участки изображаем условно, предполагая, что связь содержит совокупность механизмов, передающих движение от шпинделя III к ведущему валу IV коробки подач. По этим же причинам не раскрываем содержание органа настройки iv (коробки передач), обеспечивающего получение заданного ряда подач для нарезания метрических резьб.
При этих условиях структурное уравнение цепи привода подач можно записать в следующем виде:
![]()
4. Кинематический расчет привода главного движения.
Общие положения. Требования к коробкам скоростей.
Устройство коробки скоростей неразрывно связано со всей структурой привода шпинделя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.