На основании вышеизложенного следует, что для нарезания однозаходной внутренней резьбы в полом цилиндре требуется создать сложное двухэлементарное исполнительное движение формообразования ФV(В1П2). Т.к. движение сложное, то оно может быть создано сложной кинематической группой, представляющей собой сочетание двигателя, внутренней и внешней связью. В1 образуется вращательной кинематической парой 3 и 4, П2 получается поступательной кинематической парой: суппорт 5 и направляющая 6.
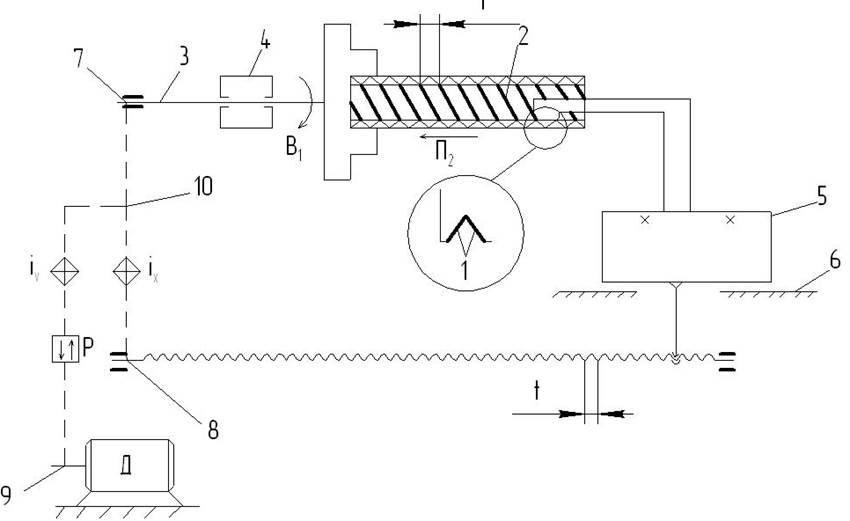
Рис. 2.1. Структурная схема станка
Чтобы получить исполнительное движение заданной траекторией, т.е. винтовое движение, необходимо установить жесткую связь между шпинделем 3 и ходовым винтом, исключающую свободное, независимое движение шпинделя и суппорта. Эта связь, обеспечивающая траекторию исполнительного движения, и является внутренней связью.
Для получения самого движения необходим источник движения в качестве которого может быть использован практически любой механизм, в данном случае источником движения является двигатель Д. Для передачи движения необходимо двигатель Д соединить с любым звеном внутренней связи,допустим с точкой 10. Эта связь 9-10 и является внешней связью кинематической группы. Сочетание двигателя, внутренней и внешней связи обеспечивающей получение любого формообразующего движения называется кинематической группой. Для получения заданной поверхности с заданными параметрами необходимо, чтобы формообразующее движение осуществлялось с определёнными параметрами, в этом случае кинематическая группа должна содержать органы настройки при помощи которых осуществляется настройка движения на заданные параметры. Число настраиваемых параметров зависит от характера и содержания формообразующего движения. Движение ФV(В1П2) является сложным движением с незамкнутой траекторией, т.к. движение включает несколько кинематических связей представленных в виде кинематической пары (содержащей два и более элементарных движений), и оно должно настраиваться по пяти параметрам: путь и исходное положение на схеме не показываются; направление обеспечивается реверсивным механизмом Р или изменением направлением вращения двигателя; скорость и траектория обеспечивается при помощи специальных органов настройки, таких как коробка скоростей iv и подач ix.
Таким образом, получена кинематическая группа, обеспечивающая получение исполнительного движения ФV(В1П2) и имеющая структурные уравнения связей:
внутренняя связь ![]()
внешняя связь ![]()
Нетрудно заметить, что станок по содержанию формообразующей структуры относится к классу Э 1.1.
3.Разработка кинематической схемы.
Каждому исполнительному движению в станке соответствует в станке своя кинематическая цепь, т.е. ряд элементов, по которым передается движение от источника к исполнительному органу (шпинделю, суппорту, столу, ползуну и т.п.). Осуществляемая кинематическими цепями связь накладывает на элементы и исполнительные органы ограничения, не позволяющая им занимать произвольные относительно друг друга положения и иметь произвольные скорости. Кинематическая связь может осуществляться как механическими, так и немеханическими передачами (например, электрическая цепь в станках с ЧПУ).
Для изменения параметров движения (скорости, направления, траектории) исполнительных органов в кинематические цепи вводят органы настройки в виде коробок скоростей (подач), гитар сменных колес и электронных управляющих блоков.
Взаимосвязанную совокупность условно изображенных исполнительных органов, элементов кинематических цепей и источников движения называют кинематической схемой станка.
Для изображения кинематических схем металлорежущих станков используют условные графические обозначения по ГОСТ 2770 – 74. Схемы обычно вычерчивают в виде развертки, на которой в целях удобства допускается перенос и поворот отдельных элементов относительно их истинного положения. В отдельных случаях сопряженные элементы соединяют штриховой линией.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.