|
ω |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 |
|
P(ω) |
0,90 |
1,01 |
1,19 |
-1,34 |
-0,51 |
-0,25 |
-0,15 |
-0,09 |
-0,06 |
-0,04 |
-0,03 |
-0,02 |
-0,02 |
-0,01 |
Строим график зависимости Р(ω) (рисунок 5).

Рисунок 5 – Вещественная частотная характеристика системы
При построении переходного процесса важно помнить свойства ВЧХ , а именно, что:
![]() .
.
![]()
![]()
![]()
К полученной ВЧХ замкнутой системы применяют правила разбивки на трапеции, определяют параметры трапеций и представляют их в виде таблицы. При разбивке ВЧХ следует помнить, что все трапеции одной стороной должны прилегать к оси ординат, а также что должно выполняться равенство:
 ,
,
где ri – высота i-й трапеции; Р(0) – значение Р(ω) при ω = 0.
Коэффициент наклона рассчитывают по формуле:
 ,
,
где ωс — частота среза, ωd — динамическая частота.
Переход от табличной величины функции h(τ) к реальному ее значению h(t) производят по формуле:
 ,
,
где r — высота трапеции; t — реальное время, с, t = τ/ωс; τ – табличное значение времени, с; ωс - частота среза реальной трапеции.
Разбиваем ВЧХ на трапеции (рисунок 6).
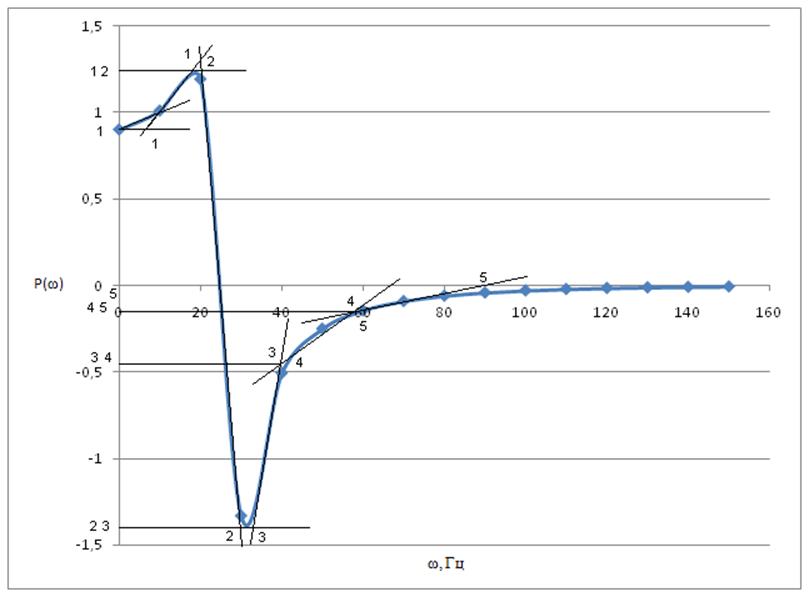
Рисунок 6 – Вещественная частотная характеристика системы, разбитая на трапеции
Составляем уравнения трапеций:
![]() .
.
Таблица 3 – Параметры трапеций
|
Тр1 |
Тр2 |
Тр3 |
Тр4 |
Тр5 |
|
|
ωd, с-1 |
9 |
20 |
32 |
39 |
56 |
|
ωc, с-1 |
18 |
28 |
39 |
56 |
90 |
|
χ |
0,50 |
0,72 |
0,82 |
0,70 |
0,62 |
|
r |
–0,3 |
2,55 |
–0,9 |
–0,3 |
–0,15 |
Таблица 4 – h–функция
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.