Рисунок 23 – ЛАЧХ корректирующего устройства
Для получения необходимой ЛАЧХ необходимо добавить в схему усилитель.
Передаточная функция усилителя:
![]()
Передаточная функция такого вида существует у пропорционального звена.
Нахождение начального значения ЛАЧХ:
![]() .
.
Строим график ЛАЧХ усилителя (рисунок 24).
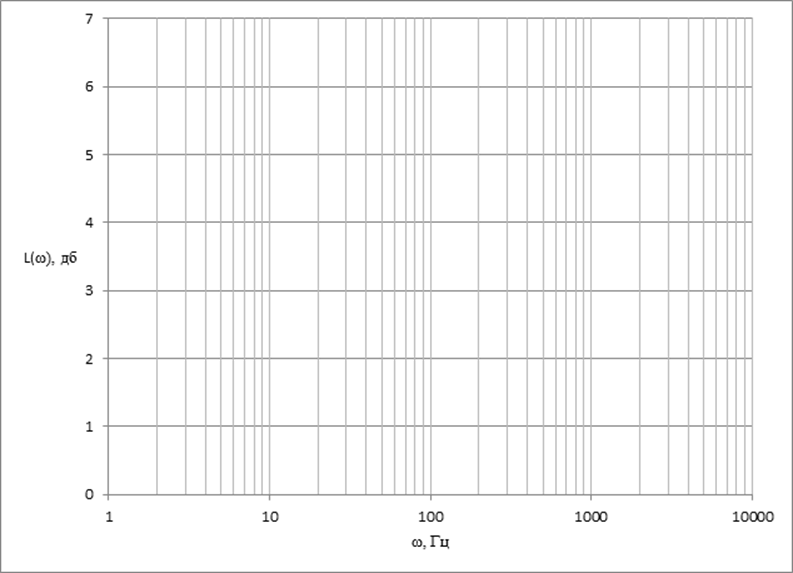
Рисунок 24 – ЛАЧХ усилителя
Нахождение суммарной ЛАЧХ корректирующего устройства.
Строим график суммарной ЛАЧХ корректирующего устройства (рисунок 25).
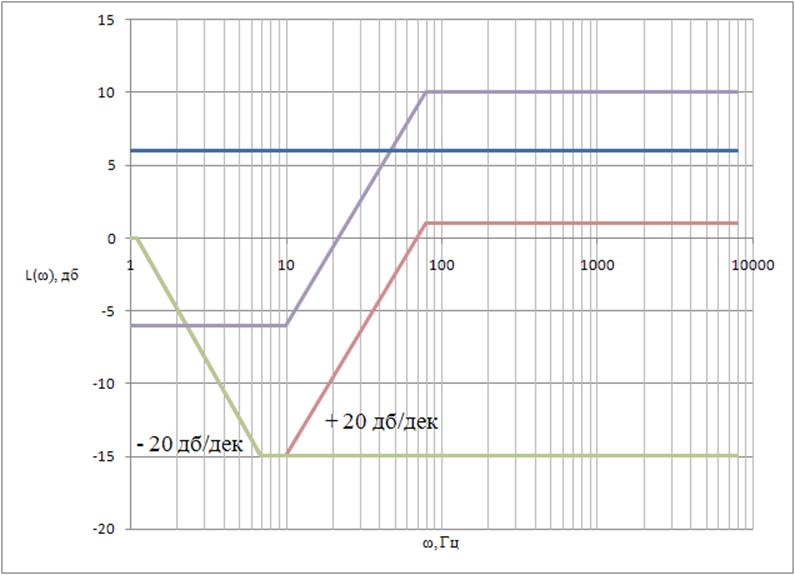
Рисунок 25 –
ЛАЧХ корректирующего устройства
2.5 Составление структурной схемы системы после окончательной коррекции и определение её передаточной функции
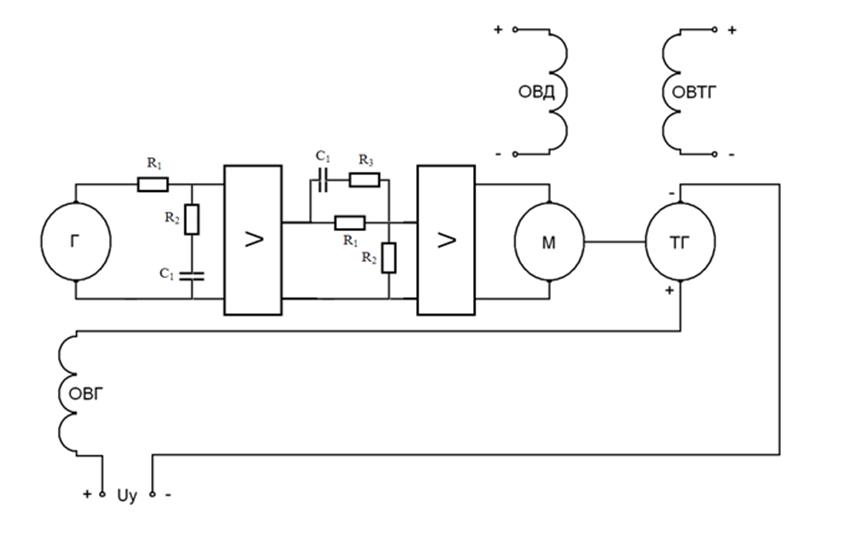
Рисунок 26 – Схема АСР скорости вращения вала двигателя постоянного тока с независимым возбуждением после синтеза корректирующего устройства
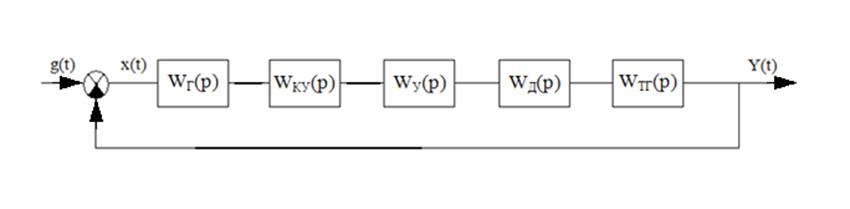
Рисунок 27 – Структурная схема АСР
Передаточная функция разомкнутой системы:
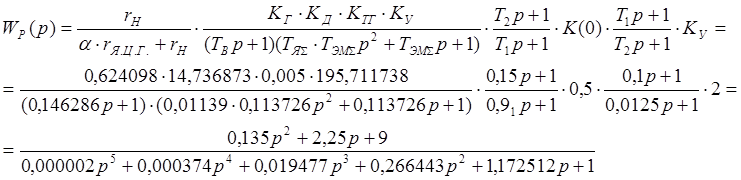
Передаточная функция замкнутой системы:

2.6 Исследование устойчивости скорректированной АСР
Передаточная функция замкнутой системы:
Устойчивость АСР устанавливают по алгебраическому критерию Гурвица. Определитель Гурвица для системы 5-го порядка имеет вид:
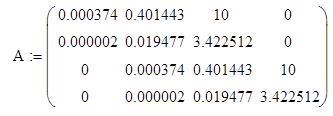
Главный определитель Гурвица равен:
![]()
Для того чтобы система была устойчива, необходимо и достаточно, чтобы главный определитель Гурвица и все диагональные миноры были больше нуля при выполнении правила Стодолы.
Правило Стодолы выполняется: все коэффициенты характеристического уравнения одного знака, а именно положительные.
Главный определитель Гурвица и все диагональные миноры больше нуля.
Можно сделать вывод: система устойчива.
2.7 Построение переходного процесса АСР после синтеза с использованием ПП MathCAD или VisSim

Рисунок 28 – Структурная схема системы, построенная с использованием программного продукта VisSim.
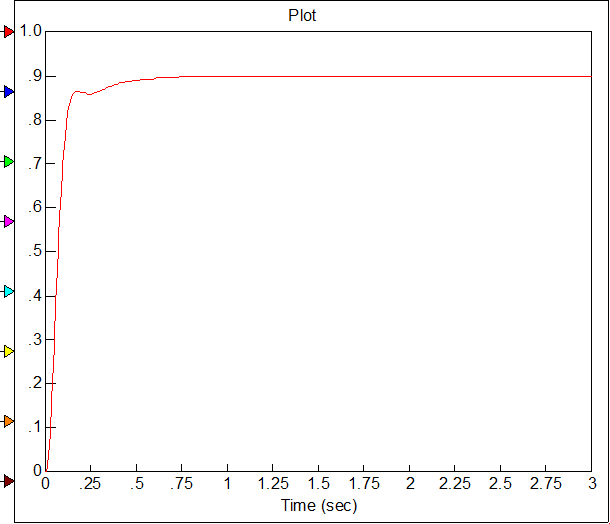
Рисунок 29 – Кривая переходного процесса, построенная с использованием программного продукта VisSim.
2.8 Анализ полученных результатов
Переходной процесс устойчивый,
монотонный, статическое отклонение nуст = 0
об/мин, динамическое отклонение nmax1
= 0 об/мин, время достижения первого максимума tmax1
= 0,2 с, время регулирования tР = 0,8 с,
статическая ошибка ∆ = 0 %, перерегулирование σ = 0 %.
Заключение
В результате выполнения курсовой работы, был проведён анализ системы автоматического регулирования, составлены передаточные функции, построен переходной процесс методом трапеций, а также с помощью программных продуктов MathCAD и VisSim, исследована устойчивость системы, получены показатели качества, проведён синтез корректирующего устройства методом логарифмической частотной характеристики, выбрана схема корректирующего устройства.
Сравнение полученных результатов показывает, что колебательный переходной процесс стал монотонным, время регулирования снизилось с 1,3 с до 0,8 с, также значительно уменьшилась статическая ошибка.
Скорректированная система полностью отвечает всем поставленным при
проектировании требованиям.
Список использованной литературы
Г.В. Геращенко. Справочник по обмоточным данным электрических машин и аппаратов : справ. пособие, 2-е изд., испр. И доп. – Киев. : Техника, 1972. – 536 с.
Я.С. Гурин. Электрические машины постоянного тока единой серии П1-22 габаритов и двигатель-генераторы : справ. каталоог. – М. : ВНИИЗМ, 1964. – 227 с.
Расчёт автоматических систем.: учеб. А.В. Фатеев, А.А. Вавилов, Л.П. Смольников. – М. : высш. шк., 1973. – 336 с.
Машины электрические : справ. пособие. – М : ВНИИстандарт-электро, 1990. – 167 с.
Е.И. Хлыпало. Нелинейные системы автоматического регулирования: расчёт и проектирование : учеб. пособие. – Л. : Энергия, 1967, 452 с.
А.А. Иванов. Теория автоматического управления и регулирования : учеб. пособие. – М. : Недра, 1979, 352 с.
А.В. Нетушила. Теория автоматического управления : учеб. пособие. – М. : высш. шк, 1986, 367 с.
Д.П. Ким. Теория автоматического управления : учеб. пособие. – М. : ФИЗМАТЛИТ, 2003, 288 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.