1.5. Расчёт вещественной частотной характеристики заданной системы и построение переходного процесса по задающему воздействию приближённым методом трапеций…………....…………………………………………………………......……..…...14
1.6. Построение переходного процесса с использованием ПП MathCAD или VisSim…………..…………………………………………………………......……..…...21
1.7. Анализ полученных результатов……………….…………………......……..…...22
2. Синтез АСР методом логарифмических частотных характеристик……….............23
2.1. Расчёт и построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) исходной системы…………………………………..……………….…………23
2.2. Построение ЛАЧХ желаемой системы...…………………………….……….….28
2.3. Нахождение ЛАЧХ последовательного корректирующего устройства...….….30
2.4. Выбор корректирующего устройства, определение передаточной функции и расчёт параметров корректирующей цепочки…………………………….……….…..31
2.5. Составление структурной схемы системы после окончательной коррекции и определение её передаточной функции……...…………………………….……….…..38
2.6. Исследование устойчивости скорректированной АСР…...…………………….39
2.7. Построение переходного процесса АСР после синтеза с использованием ПП MathCAD или VisSim……………………………………………...…………………….39
2.8. Анализ полученных результатов…………………………...…………………….40
Заключение…………………………………………….…..……………………………..41
Список
используемой литературы……………………………………………………...42
Введение
В последнее время в инженерной практике для получения требуемого качества систем управления наиболее широко применяются частотные методы исследования систем и определения параметров корректирующих звеньев. Из нескольких частотных методов расчета с построением частотных характеристик (прямых и обратных) для замкнутых и разомкнутых систем наиболее разработанным и удобным является метод логарифмических частотных характеристикс расчетом по ступенчатому воздействию. Это подтверждается большим количеством разработанных номограмм, диаграмм, графиков и типовых характеристик.
Достоинством метода является простота построения некорректированной и желаемой характеристик, а также нахождение суммарной характеристики последовательных корректирующих звеньев. Для обратных корректирующих звеньев расчет значительно усложняется, но на практике они получили широкое распространение как технически удобное средство коррекции.
Расчет автоматической системы, состоящей из связанных между собой
в единую замкнутую цепь различных элементов, представляет достаточно сложную
задачу с возможностью многозначного решения. Выбор оптимального решения зависит
от требований, которые выдвигаются в конкретных условиях (малогабаритность,
быстродействие, точность и другие). Поэтому детальный план расчета следящей
системы не может носить универсального характера.
1 Анализ АСР скорости вращения вала двигателя постоянного тока с независимым возбуждением
1.1 Выбор основных элементов схемы регулирования по заданной мощности на валу двигателя и скорости вращения вала двигателя
Таблица 1 – Требования к системе
|
Номер варианта |
Номер схемы |
n, об/мин |
Pном, кВТ |
tр, с |
∆, % |
σ, % |
|
32 |
4 |
1500 |
6 |
1 |
10 |
25 |
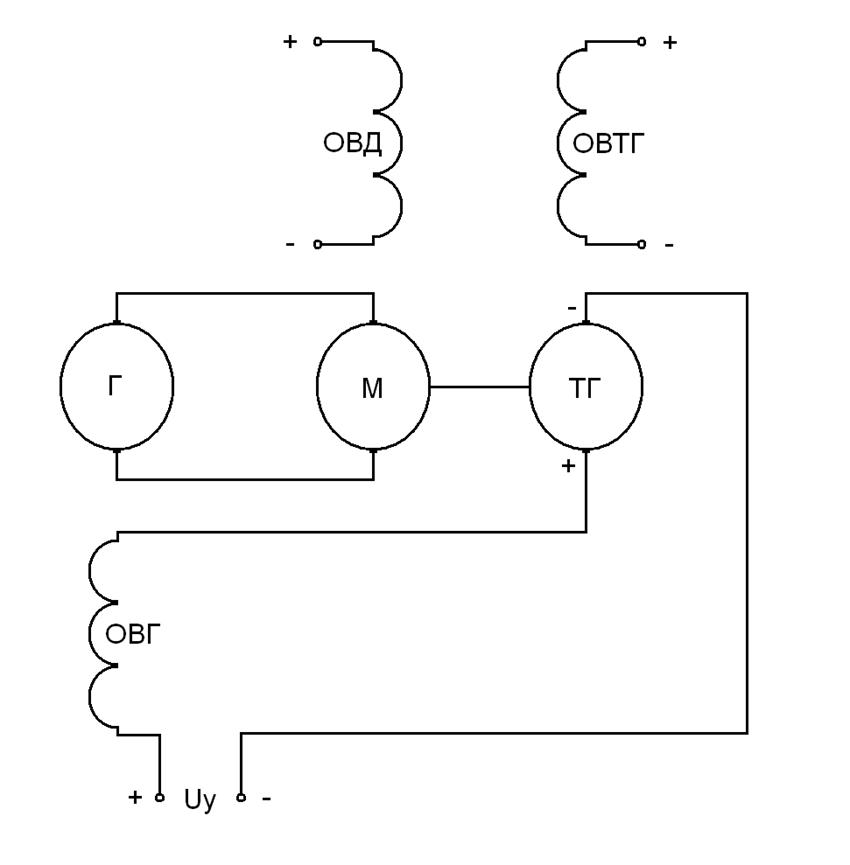
Рисунок 1 – Схема АСР скорости вращения вала двигателя постоянного тока с независимым возбуждением
На рисунке 1 изображена схема АСР, где М – двигатель; ТГ – тахогенератор; Г – генератор; ОВД – обмотка возбуждения двигателя; ОВТГ – обмотка возбуждения тахогенератора; ОВГ – обмотка возбуждения генератора.
Выбор элементов АСР
Электрический двигатель – электромеханическая машина, превращающая электрическую энергию во вращательное движение. Главными элементами двигателя являются: ротор (Якорь) – вращающийся под действием сил магнитного поля вал, статор (обмотка возбуждения) – неподвижная часть, двигателя, создающая магнитный поток, приводящий в движение ротор (якорь).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.