
а) б)
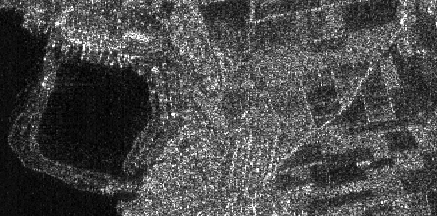
Рис. 14.12. Исходное изображение, сформированное РСА (искаженное спеклом) (а) и результат его двухэтапной обработки (б)
Отметим,
что фильтры, обеспечивающие максимальное ![]() ,
не всегда приводят к наилучшим результатам в плане интерпретационных критериев.
В частности, ДКП-фильтр обычно обеспечивает большее
,
не всегда приводят к наилучшим результатам в плане интерпретационных критериев.
В частности, ДКП-фильтр обычно обеспечивает большее ![]() , чем МСФ. Однако, если решается
задача обнаружения и локализации по обработанному изображению малоразмерных
объектов, то на этапе предварительной обработки целесообразно использовать МСФ,
а не ДКП-фильтр.
, чем МСФ. Однако, если решается
задача обнаружения и локализации по обработанному изображению малоразмерных
объектов, то на этапе предварительной обработки целесообразно использовать МСФ,
а не ДКП-фильтр.
14.8. Другие методы обработки изображений
Ранее уже говорилось о том, что при превалирующем влиянии эффектов смаза и дефокусировки в присутствии не очень интенсивных помех решается не задача фильтрации, а задача восстановления изображений, хотя при этом в том или ином виде могут использоваться и методы линейной или нелинейной фильтрации. Основная цель при восстановлении - уменьшить негативное влияние функции рассеяния точки в (14.2) и не допустить усиление помех, а, при возможности, и частично подавить их.
Классические постановка и подход к решению
задачи восстановления предполагают выполнение условий ![]() ,
,
![]() ,
, ![]() .
.
Выражение (14.2) в
дискретном виде в области пространственных частот ![]() и
и ![]() (KxL
- размер изображения) записывается в виде
(KxL
- размер изображения) записывается в виде
![]() , (14.29)
, (14.29)
где ![]() ,
, ![]() и
и ![]() -
двумерные дискретные спектры (Фурье - образы) соответственно обрабатываемого и
истинного изображений и помех;
-
двумерные дискретные спектры (Фурье - образы) соответственно обрабатываемого и
истинного изображений и помех; ![]() - Фурье-образ
дискретизированной функции
- Фурье-образ
дискретизированной функции ![]() .
.
Метод восстановления,
обычно называемый тихоновской регуляризацией, предусматривает
использование стабилизирующего функционала ![]() и
следующей процедуры
и
следующей процедуры
![]() , (14.30)
, (14.30)
где ![]() -
параметр регуляризации, а
-
параметр регуляризации, а ![]() описывается выражением
описывается выражением
![]() , (14.31)
, (14.31)
![]() ,
, ![]() - порядок регуляризации. Варьируя и выбирая
- порядок регуляризации. Варьируя и выбирая
![]() и
и ![]() , можно
достичь компромисса между устранением дефокусировки (смаза) и подавлением
помех.
, можно
достичь компромисса между устранением дефокусировки (смаза) и подавлением
помех.
Очевидно, что восстановление с использованием регуляризации представляет собой линейную фильтрацию в частотной области. Наблюдаемые при этом эффекты повышения четкости изображения видны на рис. 14.13. Желающим ознакомиться с другими методами восстановления ( а к настоящему времени разработаны разнообразные подходы) рекомендуем книгу Г.И. Василенко.
|
а) |
б) |
Рис. 14.13. Исходное изображение (а) и результат его восстановления (б).
Другая задача обработки изображений - их сегментация, которая предусматривает разбиение изображений на участки, являющиеся однородными по тому или иному признаку. Простейший из этих признаков для одноканальных изображений - диапазон значений. Кроме того, возможна сегментация с учетом текстурных признаков. Для цветных изображений при сегментации могут использоваться также цветовые признаки, а для изображений дистанционного зондирования - принадлежность к объектам различного типа, например, водная поверхность, лес, сельскохозяйственные угодья, урбанизированные области и т.д. При сегментации несколько признаков, например, цвет и текстура, могут использоваться в комплексе.
Многие
методы сегментации в качестве одного из основных этапов предусматривают
обнаружение и локализацию границ площадных объектов. К алгоритмам обнаружения
(детектирования) границ предъявляется ряд противоречивых требований. Они должны
обеспечивать надежное обнаружение истинных границ и точно (неразрывной линией
минимальной ширины) указывать их положение на изображении. Часто желательно,
чтобы детекторы не реагировали на протяженные объекты шириной один-два пиксела,
были устойчивы к присутствию импульсных помех при ![]() , давали минимальное число ложных
срабатываний на однородных участках изображений и т.д.
, давали минимальное число ложных
срабатываний на однородных участках изображений и т.д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

