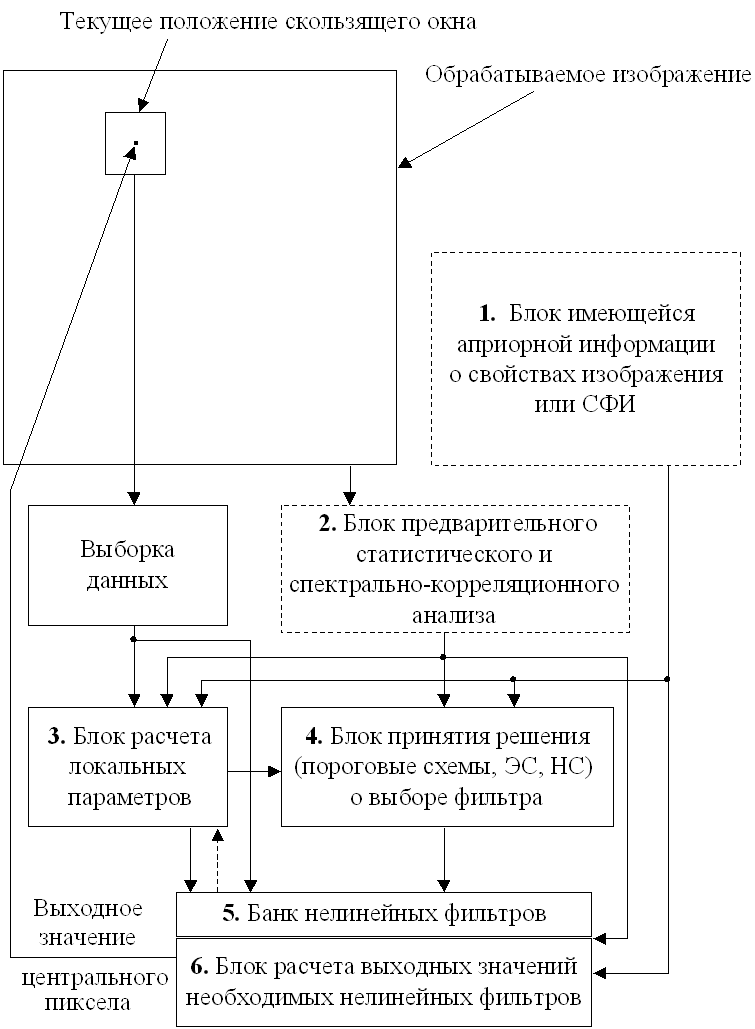
Рис. 14.9. Обобщенная блок-схема локально-адаптивного фильтра
с жестким переключением



a) б) в)
Рис. 14.10. Результат
обработки тестового изображения “Барбара”, искаженного гауссовым шумом с sn2=100
(a) (![]() =28,12
дБ) при использовании двухкомпонентного ЛАФ (б) (
=28,12
дБ) при использовании двухкомпонентного ЛАФ (б) (![]() =30,58 дБ) и трехкомпонентного ЛАФ(в) (
=30,58 дБ) и трехкомпонентного ЛАФ(в) (![]() =33,43 дБ)
=33,43 дБ)
Степень
повышения качества изображения, характеризуемая, например, разностью ![]() , на практике зависит от многих
факторов: дисперсии и ПРВ помех, отношения числа пикселов, соответствующих
локально-активным участкам (текстуре, границам, малоразмерным объектам), к
общему числу пикселов в обрабатываемом изображении, и собственно эффективности
применяемого фильтра. Для наилучших фильтров в случае обработки 8-битных
изображений разными типами помех, примерные достижимые значения
, на практике зависит от многих
факторов: дисперсии и ПРВ помех, отношения числа пикселов, соответствующих
локально-активным участкам (текстуре, границам, малоразмерным объектам), к
общему числу пикселов в обрабатываемом изображении, и собственно эффективности
применяемого фильтра. Для наилучших фильтров в случае обработки 8-битных
изображений разными типами помех, примерные достижимые значения ![]() приведены в таблице 14.1.
приведены в таблице 14.1.
Таблица 14.1.
|
|
|
|
Рекомендуемый фильтр |
|
|
25 |
0 |
0 |
МСФ (5х5), NSпор=0 |
3-7 дБ |
|
100 |
0 |
0 |
3-комп. ЛАФ |
5-8 дБ |
|
400 |
0 |
0 |
3-комп. ЛАФ |
6-9 дБ |
|
100 |
0 |
0,02 |
МСФ (5х5), NSпор=5 |
6-10 дБ |
|
400 |
0 |
0,1 |
ЦВМФ
( |
13-17 дБ |
|
0 |
0,01 |
0 |
МСФ (5х5), NSпор=0 или ДКП |
4-8 дБ |
|
0 |
0,05 |
0 |
3-комп. ЛАФ |
6-10 дБ |
|
0 |
0,27 |
0 |
Ли (7х7)+ДКП |
7-10 дБ |
|
0 |
0,05 |
0,02 |
МСФ (7х7), NSпор=5 |
6-9 дБ |
|
0 |
0,27 |
0,02 |
Ли (7х7)+КМГФ |
9-14 дБ |
Второй подход к повышению эффективности обработки и устранению недостатков однопроходных фильтров - применение процедур многоэтапной фильтрации изображений, при котором используются, как минимум, два различных фильтра и на более поздних этапах обрабатывают изображение, полученное с выхода фильтра, примененного на предыдущем этапе. Это позволяет "распределить" функции фильтров и цели обработки на каждом этапе, а также использовать достоинства различных типов фильтров.
Приведем конкретные примеры. Как
отмечалось выше, ДКП-фильтр успешно применим при отсутствии импульсных помех и
в таких ситуациях он обладает хорошим компромиссом свойств. С другой стороны
ЦВМФ способен обеспечить приемлемый компромисс между устранением импульсных
помех и сохранением деталей, если ![]() .
При этом ЦВМФ плохо подавляет помехи на однородных участках.
.
При этом ЦВМФ плохо подавляет помехи на однородных участках.
Воспользуемся
достоинствами этих двух фильтров для обработки изображения, приведенного на
рис. 14.7,б (![]() =14,7 дБ,
=14,7 дБ, ![]() ). Применим на первом этапе ЦВМФ, а
на втором - ДКП-фильтр. Изображение на выходе ЦВМФ (скользящее окно содержит 9
пикселов,
). Применим на первом этапе ЦВМФ, а
на втором - ДКП-фильтр. Изображение на выходе ЦВМФ (скользящее окно содержит 9
пикселов, ![]() ) показано на
рис. 14.11,а (
) показано на
рис. 14.11,а (![]() 25,4 дБ), а
итоговое изображение после применения ДКП-фильтра - на рис. 14.11,б (
25,4 дБ), а
итоговое изображение после применения ДКП-фильтра - на рис. 14.11,б (![]() 30,6 дБ). Очевидно, что каждый из
фильтров на соответствующем этапе достаточно хорошо выполнил возложенные на
него задачи, а в результате получен
30,6 дБ). Очевидно, что каждый из
фильтров на соответствующем этапе достаточно хорошо выполнил возложенные на
него задачи, а в результате получен ![]() =15,9
дБ.
=15,9
дБ.


а) б)
Рис. 14.11. Результаты применения двухэтапной обработки зашумленного изображения на рис. 14.7,б: на выходе ЦВМФ (а); на выходе ДКП-фильтра, примененного к изображению на выходе ЦВМФ (б).
Второй пример - РСА-изображение искажено
спеклом с ПРВ, близкой к релеевской, ![]() (рис. 14.12,а). Предлагается на первом этапе использовать фильтр Ли
(7х7), который сохраняет границы, детали и текстуру, а на однородных участках
нормализует ПРВ остаточного мультипликативного шума. Далее, на втором этапе,
предлагается использовать ДКП-фильтр с учетом относительной дисперсии
остаточных помех, что позволяет дополнительно подавить шум и сохранить
информацию, важную для последующей интерпретации (рис. 14.12,б).
(рис. 14.12,а). Предлагается на первом этапе использовать фильтр Ли
(7х7), который сохраняет границы, детали и текстуру, а на однородных участках
нормализует ПРВ остаточного мультипликативного шума. Далее, на втором этапе,
предлагается использовать ДКП-фильтр с учетом относительной дисперсии
остаточных помех, что позволяет дополнительно подавить шум и сохранить
информацию, важную для последующей интерпретации (рис. 14.12,б).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.