Из графиков, приведенных на рис. 2. 18, видно, что вероятность ошибок немного хуже, чем дляMSK. Следовательно, пилот-сигналы в системах частотной манипуляции с непрерывным изменением фазы (CPFSK) при сглаживании функцией косинус на пьедестале сравнимы по показателям с системами MSK. Однако для систем CPFSK требуется сложный алгоритм декодирования.
Так как сигналы MSK могут рассматриваться как сигналы с частотной манипуляцией в течение каждого битового такта (но не такта символа) их декодирование возможно выполнить с помощью когерентного частотного детектирования. Так как в различении двух частот участвует только энергия пилот-сигнала за такт бита (вместо такта символа), показатели декодирования будут на 3 дБ хуже, как это видно из кривых на рис. 2. 17, обозначенных «CoherentFSK». Это ухудшение может быть уменьшено на 1 дБ для этого типа декодирования при использовании частотного разделения величиной 0,7(1/Tb) в отличие от разделения 0,5/Tb, используемого при MSK.
Все выше рассмотренные декодеры предполагали использование идеального фазового опорного сигнала. Если опорный сигнал не является идеальным (т. е. фаза пилот-сигнала декодера, который используется для процедуры корреляции на рис. 2.16, отличается от фазы модулированного пилот-сигнала), показатели декодирования ухудшаются. Фазовая ошибка, возникающая при этом, является случайным процессом. В результате вероятность ошибки в двоичном разряде увеличивается и отличается от величины, представленной на рис. 2. 17 для идеального фазового опорного сигнала. На рис. 2. 19 представлены зависимости вероятностей ошибок в двоичном разряде для двухпозиционной фазовой манипуляции (BPSK) в идеальном и неидеальном случаях при различных СКО фазовой ошибки.
Фазовые ошибки приводят к «насыщению» функции вероятности ошибок в двоичных разрядах, которую невозможно уменьшить даже путем значительного увеличения энергии модулирующего сигнала Eb. Как правило, если требуемая вероятность ошибки в двоичном разряде должна быть на уровне 10-5 или менее, величина СКО фазовой ошибки не должна превышать 15о.
В некоторых системах спутниковой связи можно полностью отказаться от использования фазового когерентного опорного сигнала при декодировании. Два варианта систем кодирования, в которых фазовый опорный сигнал исключен, возможны с помощью дифференциального кодирования и с помощью некогерентной частотной манипуляции.
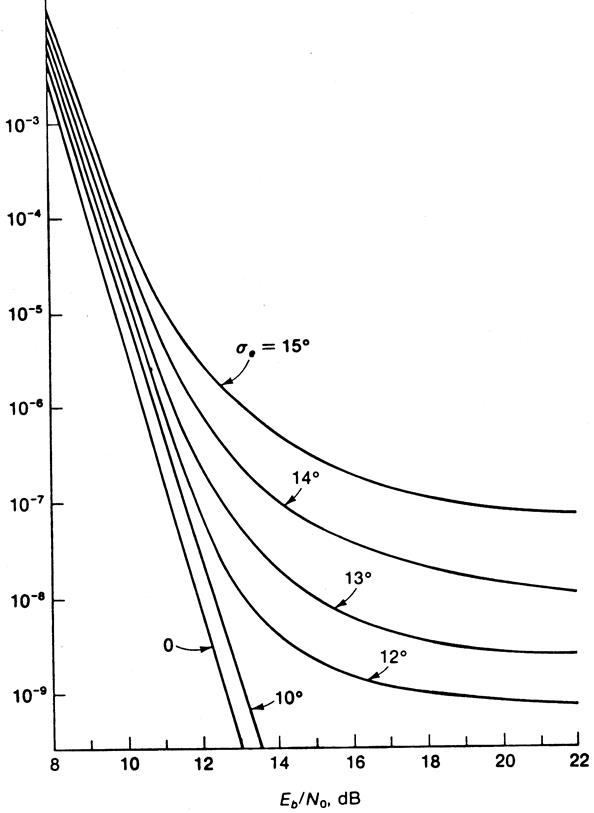
Рис. 2. 19. Вероятности ошибок в двоичном разряде для двухпозиционной фазовой манипуляции (BPSK) при различных СКО фазовых ошибок в опорном сигнале.
В случае дифференциальной фазовой манипуляции (DPSK) используют пилот-сигнал с двухпозиционной фазовой манипуляцией (BPSK), однако при этом фаза колебаний несущей для каждого бита связана с предыдущим битом. Двоичный разряд +1 или – 1 кодируют в течение такта битаTb с помощью одной и той же фазы или со сдвигом на π в отношении фазы предыдущего бита в зависимости от того, в какой фазе находится данный бит (в фазе или в противофазе с предыдущим битом). Это эквивалентно формированию пилот-сигнала с двухпозиционной фазовой манипуляцией (BPSK) в (2.3.7) с использованием последовательности однополярных прямоугольных импульсов (2.3.1) при
dk = dk-1 ak , (2.5.3)
где ak - рассматриваемый бит.
Декодирование выполняют с помощью корреляции текущего бита пилот-сигнала с предыдущим битом в течение каждого такта бита и определения знака корреляции (см. рис. 2. 20а). При этом не требуется использование когерентного опорного сигнала (колебания несущей в течение предыдущего бита используют в качестве опорного сигнала), однако показатели декодирования в этом случае немного хуже, чем в когерентной системе (рис. 2.17). Дифференциальные декодеры могут быть построены в виде корреляторов с задержкой, равной длительности одного бита, и могут быть оптимизированы с помощью использования двух параллельных двухбитовых корреляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.