Пневматические исполнительные механизмы имеют ряд важных характерных особенностей, выгодно отличающих их от других видов привода. Прежде всего, это простота конструкции, а следовательно, и низкая стоимость, удобство обслуживания и ремонта, высокая надежность. Кроме того, пневмопривод пожаробезопасен и не является источником загрязнений.
Вместе с тем он имеет и существенные недостатки. Некоторые из них обусловлены высокой сжимаемостью воздуха. Пневматические исполнительные механизмы имеют низкую выходную мощность.

Они не обеспечивают достаточно высокую точность позиционирования: поршень нельзя остановить в промежуточном положении со сколько-нибудь приемлемой точностью, сняв давление в рабочей полости или подав его в противоположную полость. Не удается обеспечить и управление скоростью перемещения поршня по заданному закону с высокой точностью. Привод имеет высокую инерционность: вследствие сжимаемости энергоносителя поршень изменяет положение не сразу после изменения давления.
Для того чтобы обеспечить плавность работы, точнее, плавность разгона и торможения привода, используют различные методы, например установку демпферов (или устройств, сопротивление которых возрастает при увеличении силы воздействия на них), подачу противодавления в другую полость цилиндра в конце его хода, перекрытие выхлопной магистрали и создание тем самым противодавления.
Кроме пневмоцилиндров поступательного движения, существуют пневмодвигатели, цилиндры вращательного движения и пневмотурбины.
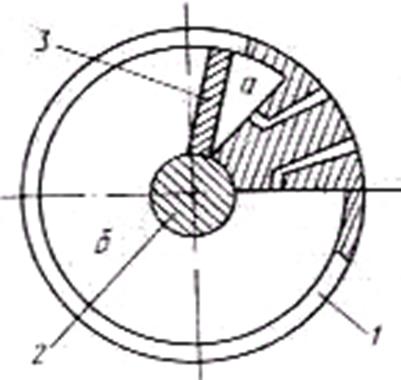


Пневмодвигатели неполного поворота (рис. 20) представляют цилиндр 1 с коаксиально расположенным в нем валом 2 и шибером 3, разделяющим цилиндр на две полости а и б. При подаче давления в полость а шибер начинает поворачивать вал 2, а тот передает вращение исполнительному звену. Однако эти двигатели имеют один существенный недостаток — трудность обеспечения уплотнения между шибером 3 и корпусом 1.
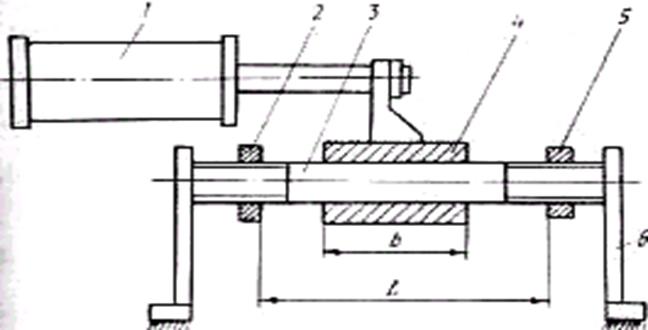
Пневмоцилиндр вращательного движения (рис. 21) состоит из цилиндра поступательного движения 2 с двумя поршнями 1 и 4, между которыми расположен шток 3 с нарезанной на нем зубчатой рейкой. В зацеплении со штоком-рейкой находится зубчатое колесо 5, передающее вращение выходному валу 6. Цилиндр работает следующим образом. При подаче давления в полость а шток-рейка начинает перемещаться, поворачивая колесо 5 и вал 6. Частота вращения вала зависит от величины хода цилиндра и диаметра зубчатого колеса.
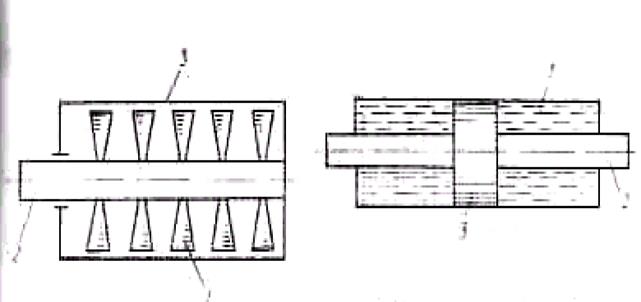 |
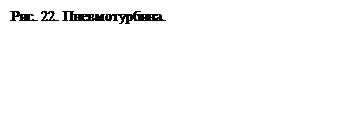
 В отличие от пневмоприводов вращательного движения, у
которых угол поворота выходного вала ограничен, пневмотурбина—полноповоротный
механизм, обеспечивающий непрерывное
вращение выходного вала. Она состоит из лопаток 1, сидящих на валу 2
в корпусе 3 (рис. 22). При подаче давления на лопатки с одной стороны
начинают поворачивать вал в определенную сторону. При подаче воздуха с другой
стороны в противоположную.
В отличие от пневмоприводов вращательного движения, у
которых угол поворота выходного вала ограничен, пневмотурбина—полноповоротный
механизм, обеспечивающий непрерывное
вращение выходного вала. Она состоит из лопаток 1, сидящих на валу 2
в корпусе 3 (рис. 22). При подаче давления на лопатки с одной стороны
начинают поворачивать вал в определенную сторону. При подаче воздуха с другой
стороны в противоположную.
Устройство гидропривода конструктивно принципиально не отличается от устройства пневмопривода. Это те же силовые цилиндры поступательного и поворотного действия, в которых в качестве энергоносителя используется жидкость. Исключение представляют только гидродвигатели. Они бывают двух типов: аксиально-поршневые и роторно-поршневые. Жидкость обладает очень важным свойством — не сжимаемостью. Именно оно позволяет управлять гидравлическим приводом посредством воздействия энергоносителя — жидкости.
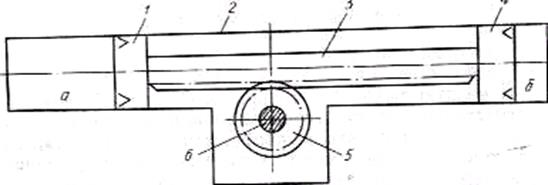
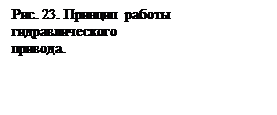
Гидроприводом (рис. 23), имеющим корпус 1, гильза 3 с двумя штоками 2 (эффективная площадь поршня с обеих сторон одинакова), можно управлять, перемещая и останавливая поршень в любой точке хода перекрытием выходной магистрали либо подачей во вторую полость противодавления. Это позволяет получить определенный закон разгона и торможения выходного звена. Это свойство гидропривода широко применяется промышленных роботах. Так, универсальный робот «Контур-002», работающий в сферической системе координат имеет гидравлический привод всех звеньев манипулятора. Это позволяет ему при грузоподъемности 5 кг имеет точность позиционирования в любой точке рабочего пространства не ниже 0,1 мм. Применение гидропривода позволяет манипулятору развивать значительные усилия
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.