Сочетание трех поступательных пар позволяет получить структурную кинематическую схему робота, работающего в декартовой системе координат (см. рис. 9), поступательных и вращательной — в цилиндрической (см. рис. 10), поступательной и двух вращательных сферической (см. рис. 11), трех вращательных— в угловой (см. рис. 12).
Известно, что произвольное движение тела в пространстве—результат сложения трех поступательных и трех вращательных движений. Поступательные движения здесь играют роль переносных, ориентация же обеспечивается с помощью вращательных движений. Причем, как мы уже убедились, вместо трех


поступательных движений для перемещения рабочего органа могут быть использованы любые комбинации из трех движений: поступательных и (или) вращательных. Кинематическая схема робота определяет форму его рабочей зоны. Выбор конкретной кинематической схемы зависит от тех технологических задач, которые должен решать робот.
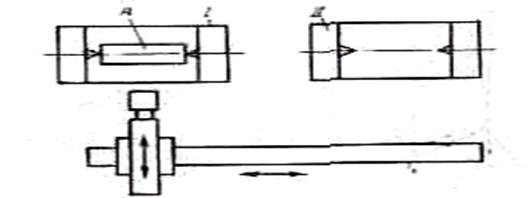
Манипуляторы, работающие в прямоугольной системе координат, удобно использовать в тех случаях, когда при перемещении детали А не возникает необходимости в её повороте, а достаточно поступательных перемещений, например манипулятор портального типа загрузки двух токарных станков (/ и //), расположенных так, как изображено на рис. 13.
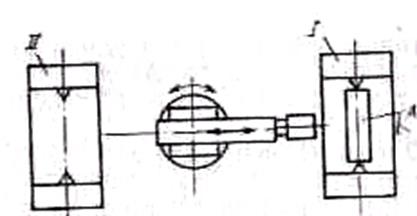
На рис. 14 показана другая компоновка комплекса из тех же двух токарных станков и обслуживающего их робота. В этом случае более пригоден робот, работающий в цилиндрической системе координат.
С точки зрения механики манипулятор представляет систему твердых и упругих тел, связанных между собой Посредством соединений с различными видами связей.
С точки зрения теории механизмов манипулятор является системой тел, предназначенных для преобразования движений нескольких тел в требуемые движения других тел, т. е. с этой точки зрения манипулятор представляет собой пространственный механизм с несколькими степенями свободы. Трудность анализа и особенно синтеза таких систем общеизвестны. До последнего времени в Теории механизмов обычно рассматривались системы с одной Степенью свободы.
Твердые тела, входящие в механическую систему манипулятора, называются звеньями. В механике различают входные и выходные звенья. Входным называется звено, которому сообщается движение, преобразуемое механизмом. Выходным называется звено, совершающее рабочее движение.
Таким образом, в манипуляторе число входных звеньев равно числу приводов, а выходное звено, как правило, одно — схват, или рабочий орган.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Кинематические пары могут быть классифицированы как по числу степеней свободы звеньев в их относительном движении, так и по числу связей, налагаемых парой на относительное движение звеньев. По первому признаку различают одно-, двух-, трех-, четырех-, пяти-подвижные кинематические пары. По второму признаку — кинематические пары пятого, четвертого, третьего, второго и первого класса (классификация И. И. Артоболевского).
В манипуляторах в основном получили распространение одноподвижные кинематические пары, т. е. пары пятого класса, допускающие относительное вращательное, поступательное или винтовое движение.
Совокупность звеньев, образующих между собой кинематические пары, называется кинематической цепью.
Кинематические цепи подразделяются на плоские и пространственные в зависимости от вида движения звеньев: в одной или нескольких параллельных плоскостях и в пространстве.
Кинематические цепи могут быть замкнутыми или незамкнутыми. Незамкнутой кинематической цепью называют такую цепь, в которой есть звенья, входящие в одну кинематическую пару.
Часто говорят, что манипуляторы имеют незамкнутую кинематическую цепь, однако, это не всегда так. Для приведения в движение манипулятор по каждой степени свободы обычно снабжается отдельным приводом и механизмом, имеющим замкнутую кинематическую цепь. Поэтому весь манипулятор представляет собой наслоение замкнутых механизмов с одной степенью свободы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.