Рабочий орган, закрепленный на конечном звене манипулятора, в "процессе его перемещения по заданной траектории при выполнении какой-либо технологической операции должен быть определенным образом сориентирован. Так, сварочная головка для обеспечения качества тарного шва должна в любой момент находиться под определенным углом к стыку свариваемых деталей. Ориентация рабочего органа в пространстве обеспечивается с помощью ориентирующих степеней подвижности манипулятора. Ориентирующие движения называются также локальными.
Кинематические характеристики исполнительной части робота зависят от числа степеней подвижности, их пила и сочетания. Именно эти особенности кинематической схемы робота выражаются понятием системы координат, в которой работает робот.
Как известно, положение точки в пространстве определяется тремя ее координатами, причем в различных системах координат ее координаты различны. В робототехнике различают четыре такие системы: декартова (прямоугольная), цилиндрическая, полярная и угловая. Разберем особенности каждой из них.
 |
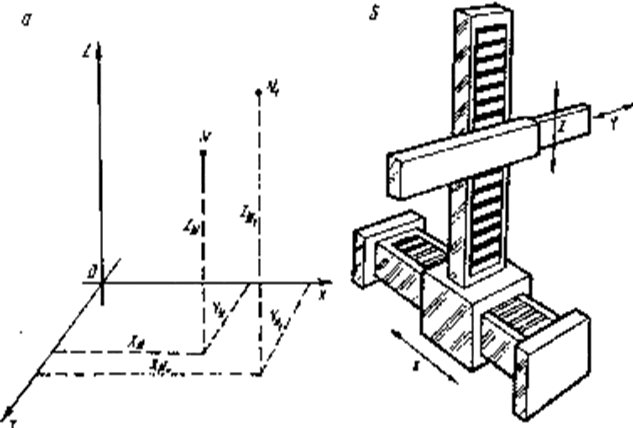
Предположим, что в пространстве задана точка N (рис. 9). Ее положение однозначно может быть задано тремя координатами — XN , YN , ZN . При перемещении этой точки в пространстве в положение N1 изменятся и ее координаты: они станут равными XN1 , YN1 , ZN1 . Величины приращения (т. е. перемещения) по всем координатам составят: ∆X=XN1 – XN ; ∆Y=YN1 – YN ;
∆Z=ZN1 – ZN .
Следовательно, задача перемещения в пространстве определенной точки, например конца охвата манипулятора, работающего в прямоугольной системе координат, сводится к перемещению ее по каждой координате в отдельности.
Положение точки в цилиндрической системе координат (рис. 10) также задается тремя величинами: радиусом, параллельным одной из плоскостей (на нашем рисунке плоскости XOY) прямоугольной системы координат высотой смещения Н этого радиуса от параллельному (базовой) плоскости и углом поворота j этого радиуса r относительно другой базовой плоскости отсчета (в нашем случае ZOX).
 |
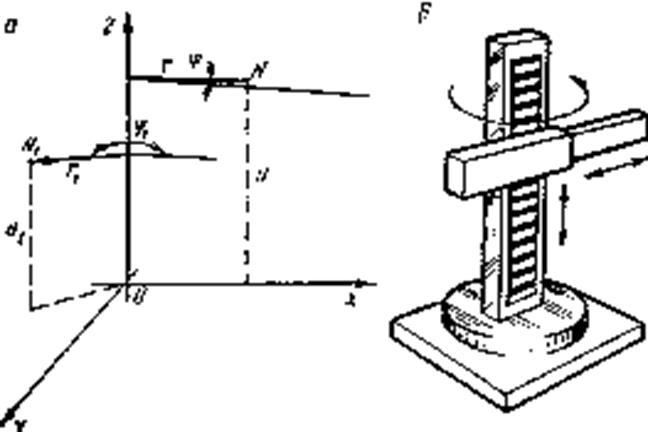 Пусть за некоторое время точка N переместилась в
положение N1. Тогда ее положение будут характеризовать новые значения
параметров: rN1 , HN1 , jN1 ; их приращения: ∆r=rN1 – rN ; ∆H= HN1 – HN ; ∆j= jN1 - jN .
Пусть за некоторое время точка N переместилась в
положение N1. Тогда ее положение будут характеризовать новые значения
параметров: rN1 , HN1 , jN1 ; их приращения: ∆r=rN1 – rN ; ∆H= HN1 – HN ; ∆j= jN1 - jN .
Если представить, что длина руки манипулятора соответствует величине радиуса r, то для достижения заданной точки в пространстве манипулятор должен поднять руку на высоту этой точки, выдвинуть руку на величину, равную радиусу r, и развернуть ее на угол j.
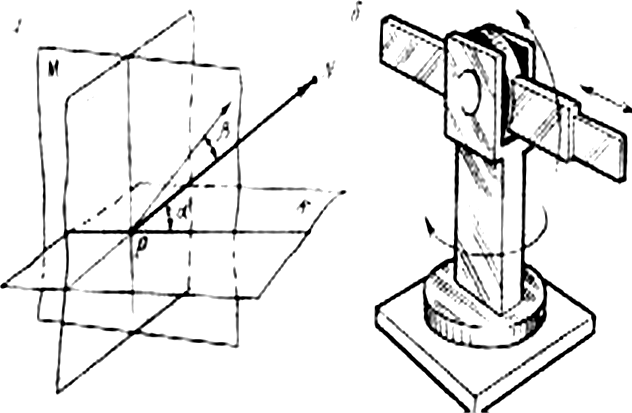
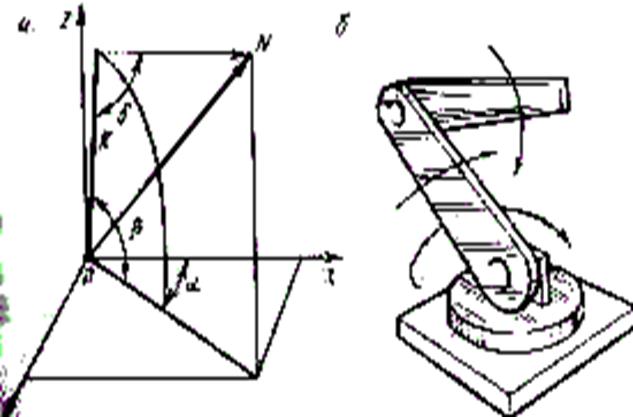
В сферической (полярной) системе координат (рис. 11) положение точки в пространстве также задается тремя параметрами: радиусом, на котором точка N расположена относительно выбранного полюса р; углами a и b наклона радиуса r относительно двух базовых взаимно перпендикулярных плоскостей К и М, причем полюс р принадлежит обеим плоскостям.
 |
Достаточно установить руку манипулятора, действующего в полярной системе координат, под углами a и b и выдвинуть ее на величину r, и тем самым будет достигнута нужная точка пространства.
В угловой системе координат (рис. 12) положение точки в пространстве задано тремя углами a, b, g, причем углы b и g лежат в одной плоскости. Тем самым при определенном соотношении длин звеньев может быть достигнута любая точка рабочей зоны. Перемещение же от точки к точке будет задано как изменение всех трех углов: ∆a=aN1 - aN ; ∆b=bN1 - bN ; ∆g=gN1 - gN .
 |
На рис. 9—12 приведенные для различных систем координат зависимости показывают, каким образом рабочий орган, закрепленный на конечном звене манипулятора, может быть перемещен в любую точку в пределах рабочей зоны робота.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.