Используя формулу (5) определим линейные скорости груза при подъеме и спуске:


1.4 Построение пусковой диаграммы двигателя, определение величин сопротивлений пусковых ступеней.
Если ограничится пределами
изменения момента двигателя от 0 до ![]() , то его механические
характеристики могут быть заменены прямыми линиями и использована следующая
методика графоаналитического расчета пусковых сопротивлений. [1, с. 157]
, то его механические
характеристики могут быть заменены прямыми линиями и использована следующая
методика графоаналитического расчета пусковых сопротивлений. [1, с. 157]
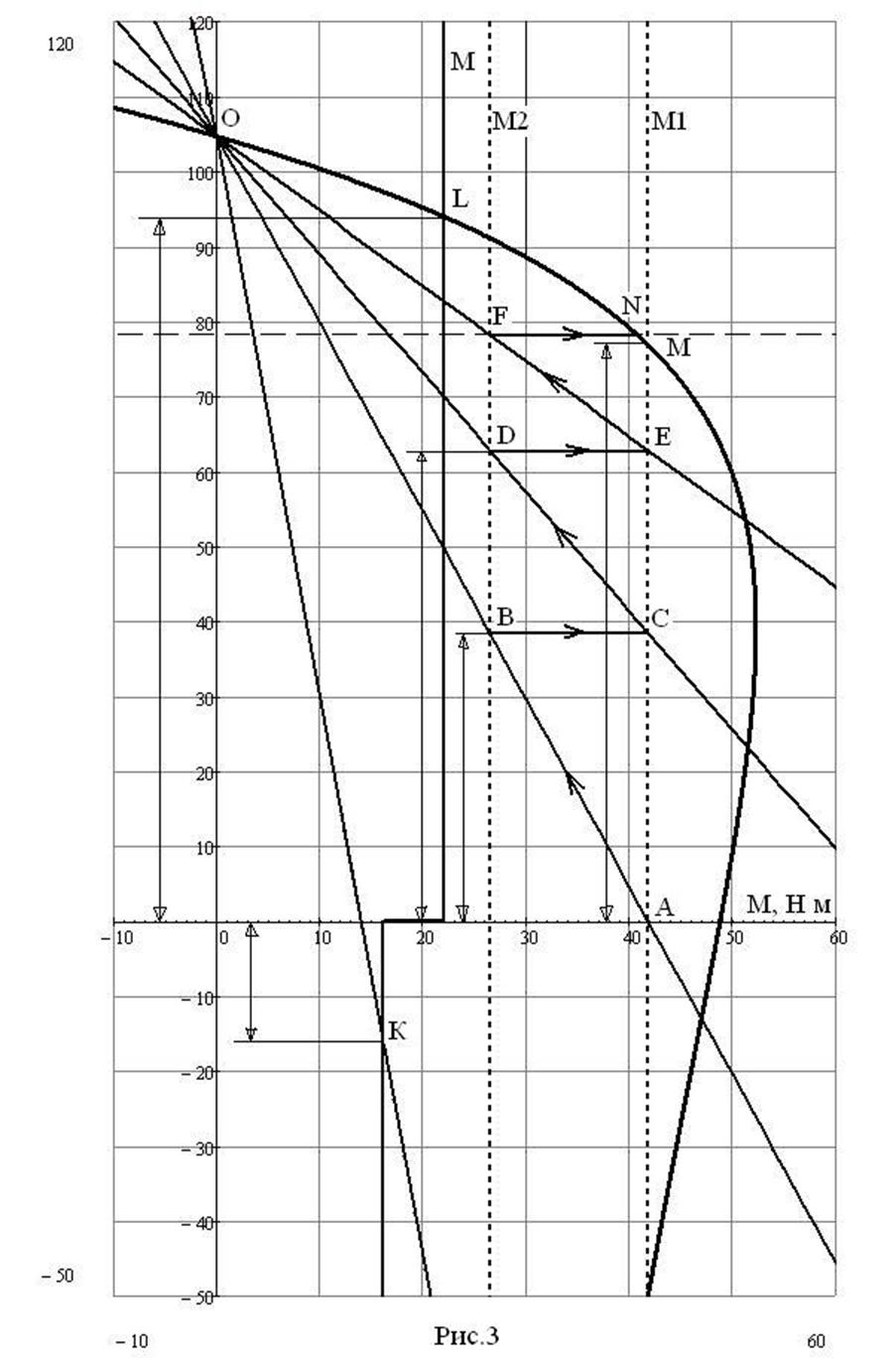
Построение начнем с построения естественной механической характеристики двигателя, используя данные, полученные в п.3, обозначим точку пересечения характеристики с осью ординат как т. О рис. 3.
Зададим пределы изменения моментов переключения ступеней пускового реостата:
![]()
![]()
Затем на пусковой диаграмме
проводим две прямые параллельные оси ординат на расстояниях соответствующих ![]() и
и ![]() . Точку
пересечения прямой
. Точку
пересечения прямой ![]() с осью абсцисс обозначим т. А,
точку пересечения с естественной механической характеристикой т. M. Точку пересечения прямой
с осью абсцисс обозначим т. А,
точку пересечения с естественной механической характеристикой т. M. Точку пересечения прямой ![]() с
естественной механической характеристикой обозначим т. L.
с
естественной механической характеристикой обозначим т. L.
Первую искусственную характеристику
проведем через точку О и точку А. В точке В происходит пересечение первой
искусственной характеристики с вертикальной прямой соответствующей ![]() . Из точки В проводим прямую параллельную
оси абсцисс до пересечения с вертикальной прямой соответствующей
. Из точки В проводим прямую параллельную
оси абсцисс до пересечения с вертикальной прямой соответствующей ![]() точка С рис. 3.
точка С рис. 3.
Вторую искусственную характеристику
проведем через точку О и точку С. В точке D происходит
пересечение второй искусственной характеристики с вертикальной прямой
соответствующей ![]() . Из точки D
проводим прямую параллельную оси абсцисс до пересечения с вертикальной прямой
соответствующей
. Из точки D
проводим прямую параллельную оси абсцисс до пересечения с вертикальной прямой
соответствующей ![]() точка Е рис. 3.
точка Е рис. 3.
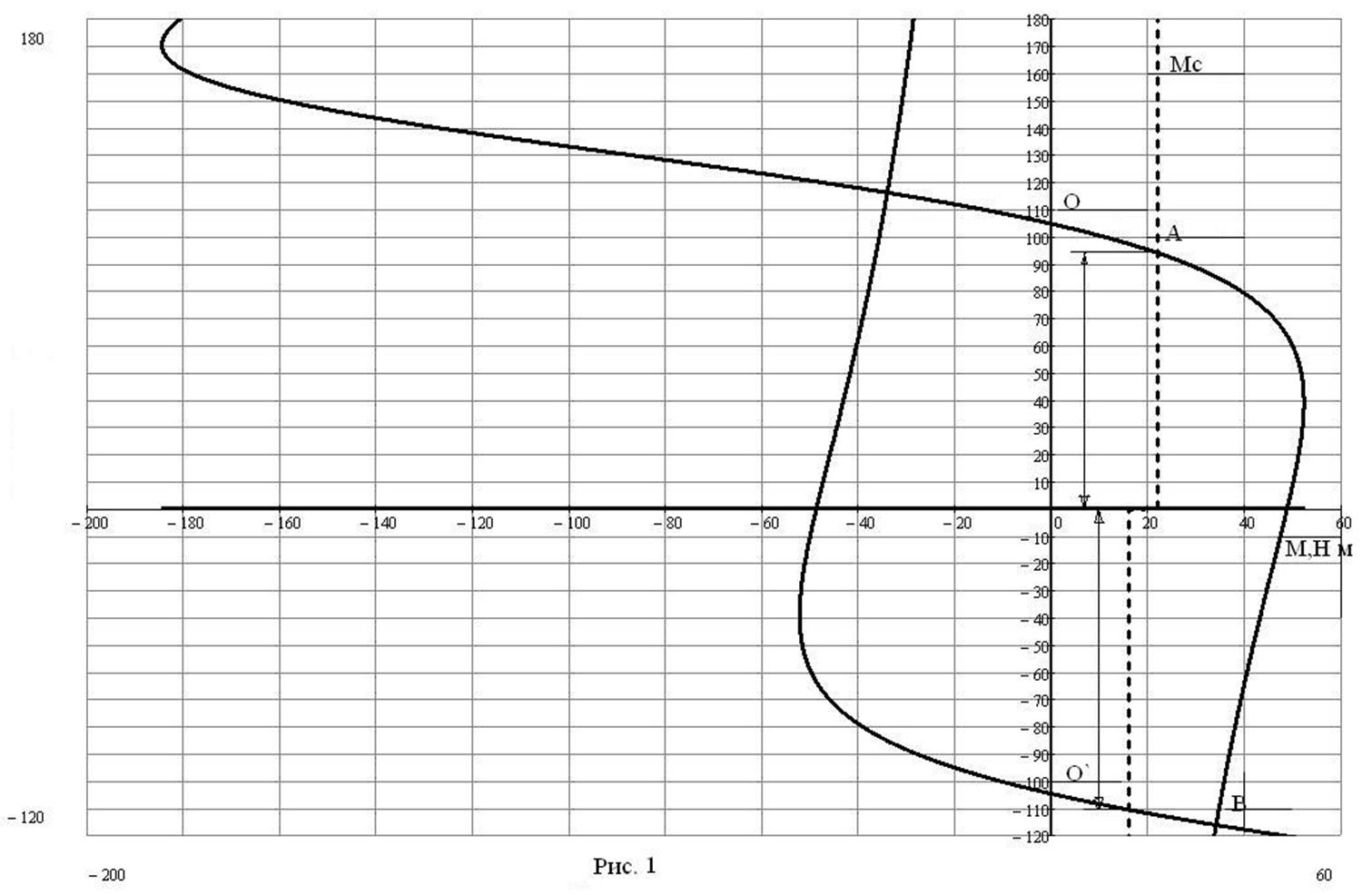
Третью искусственную
характеристику проведем через точку О и точку Е. В точке F
происходит пересечение третей искусственной характеристики с вертикальной
прямой соответствующей ![]() . Из точки F
проводим прямую параллельную оси абсцисс до пересечения с вертикальной прямой
соответствующей
. Из точки F
проводим прямую параллельную оси абсцисс до пересечения с вертикальной прямой
соответствующей ![]() точка N. Как
видно из рис. 3 точки N и M
находятся рядом, следовательно, пусковая диаграмма построена правильно.
точка N. Как
видно из рис. 3 точки N и M
находятся рядом, следовательно, пусковая диаграмма построена правильно.
В случае принятия допущения о линейности рабочих частей механических характеристик при одном и том же значении электромагнитного момента имеют место соотношения: [2, с. 8]
 (14)
(14)
где ![]() - скольжение на
естественной и искусственной характеристиках,
- скольжение на
естественной и искусственной характеристиках, ![]() -
критические значения скольжения на естественной и искусственной
характеристиках.
-
критические значения скольжения на естественной и искусственной
характеристиках.
Из выражения (14) можно получить формулу для получения величины добавочного активного сопротивления в цепи ротора:
 (15)
(15)
Для определения добавочных
сопротивлений пусковых ступеней будем использовать точки лежащие на
вертикальной прямой соответствующей ![]() .
.
Точке M на
естественной механической характеристики соответствует частота ![]() и скольжение:
и скольжение:

Точке А на первой пусковой механической
характеристики соответствует частота ![]() и скольжение:
и скольжение:
Точке C на второй
пусковой механической характеристики соответствует частота ![]() и скольжение:
и скольжение:

Точке Е на второй пусковой
механической характеристики соответствует частота ![]() и
скольжение:
и
скольжение:

Определим сопротивления пусковых ступеней по формуле (15):



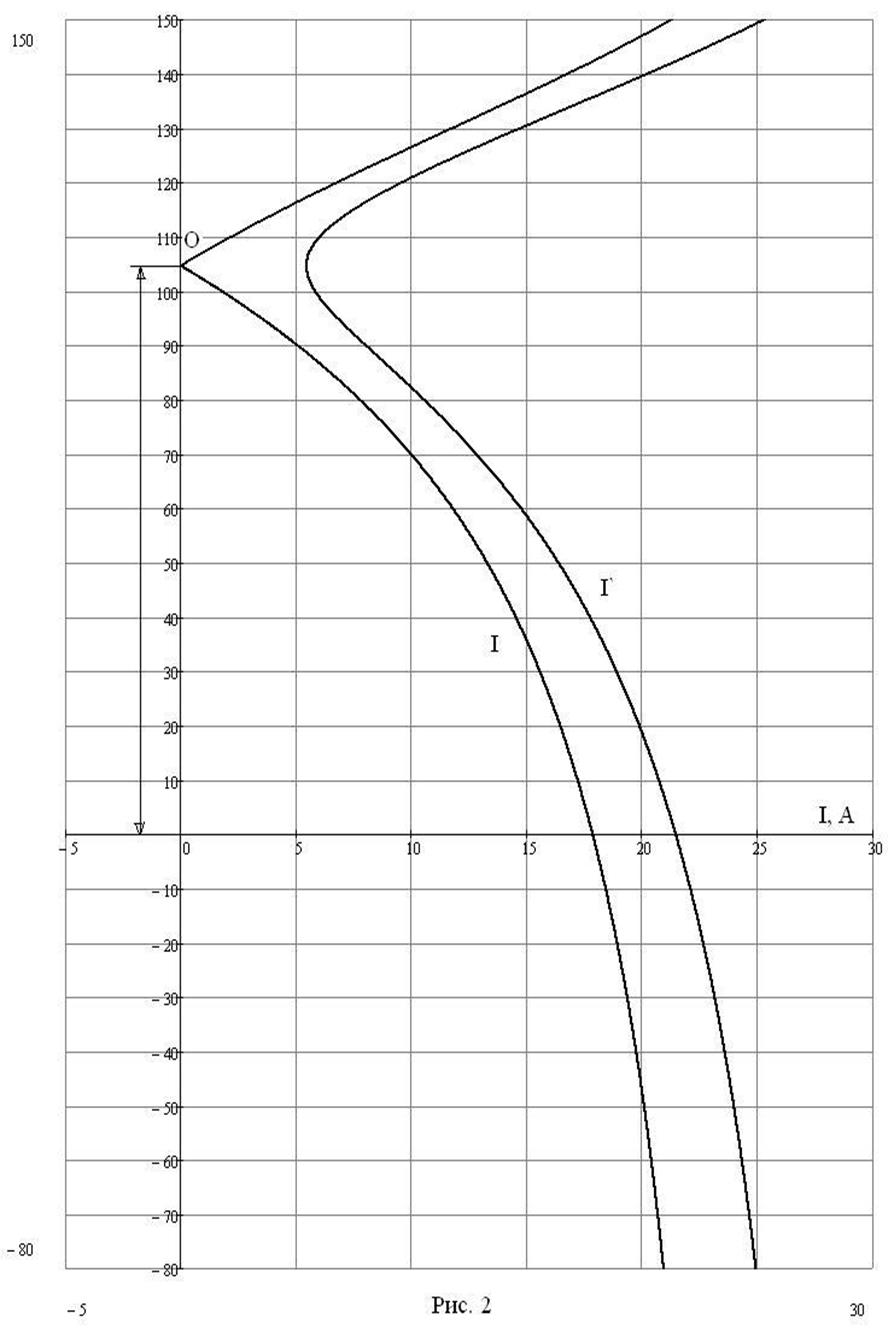
1.5. Построение искусственной
реостатной механической характеристики двигателя, обеспечивающей в режиме
противовключения при спуске груза скорость вращения, равную 0,2![]() .
.
Для двигателей с фазным ротором при активном статическом моменте режим противовключения можно получить введением больших добавочных сопротивлений в ротор.
Искусственная реостатная
механическая характеристика двигателя, обеспечивающая в режиме противовключения
при спуске груза скорость вращению, равную 0.2![]() , должна
проходить через точку О и точку K с координатами (
, должна
проходить через точку О и точку K с координатами (![]() ,
,![]() )
рис. 3, где :
)
рис. 3, где :

соответствующее скольжение:

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.