На фокусування зображення впливають різні параметри.
Їхньої назви, також межі регулювання приведені в таблиці 1.2.2.
Однак на практиці, при фокусуванні об'єкта, основним змінюваним параметром є только струм фокусирующей лінзи.
1.3 Постановка задачі дослідження
Автоматизація настроювання складних систем контролю і керування в даний час залишається усе ще однієї з важко формалізованих задач. Визначену надію на її рішення зв'язують з інтенсивною розробкою методів автоматичної класифікації.
Розглянемо постановку задачі
автонастройки в рамках методу функціонально-статистичних іспитів, що базується
на оцінці інформаційної здатності системи автоматичної класифікації. Нехай ![]() - клас настроювання, що характеризує найбільшу функціональну
ефективність Еmax системи. Дано вектор параметрів настроювання g =
<g1,..,g>, де L число параметрів і відомі відповідні
обмеження на параметри Ri(g1,..,g) = 0. Тоді X0
вихідне (базове) стан не набудованого ОКУ.
- клас настроювання, що характеризує найбільшу функціональну
ефективність Еmax системи. Дано вектор параметрів настроювання g =
<g1,..,g>, де L число параметрів і відомі відповідні
обмеження на параметри Ri(g1,..,g) = 0. Тоді X0
вихідне (базове) стан не набудованого ОКУ.
Потрібно змінити параметри
настроювання так, щоб при перекладі ОКУ з класу X0 у клас ![]() інформаційна міра Е була максимальна. При цьому розглянутий
параметр на кожнім кроці настроювання n по алгоритму
інформаційна міра Е була максимальна. При цьому розглянутий
параметр на кожнім кроці настроювання n по алгоритму

У даній дипломній роботі, виходячи з завдання, потрібно розглянути питання оцінки функціональної ефективності системи автонастройки фокусности електронного мікроскопа. Одержати математичну модель у рамках МФСИ, на підставі якої розробити алгоритм автофокусировки растрового електронного мікроскопа, що дозволяє здійснювати оперативну автофокусировку.
Розділ 2. Метод функціонально статистичних випробувань(МФСВ)
2.1 Інформаційна модель СППР
Структурну модель СППР у
загальному випадку можна податі у вигляді суперблоку, наведеного на мал.
2.1.1. Отут вхідними даними є: вектор-реалізація образу ![]() , який характеризує функціональний стан ОК, вектор випадкових
збурень
, який характеризує функціональний стан ОК, вектор випадкових
збурень ![]() , які контролюються, і вектор
випадкових збурень f(t), які не контролюються.
, які контролюються, і вектор
випадкових збурень f(t), які не контролюються.
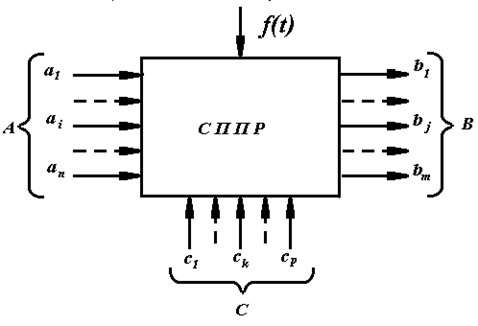
Малюнок 2.1.1
Вихідними даними СППР є вектор B{bj }, який належить простору допустимих рішень В.
Розглянемо інформаційний опис СППР для загального випадку, тобто із урахуванням вектору З={Cp}. Кількість середньої умовної інформації про вектори А і В відносно один одного при наявності на вході вектора З дорівнює
Ic(A, B)=H(A/C)-H(A/B, C)=H(B/C)-H(B/A, C)=Ip(B, C), (2.1.1)
або у вигляді ймовірностей має вигляд [ ]
 *
* 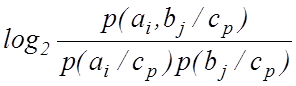 .
.
Оскільки
IA,C(B) = H(B) - H(B/A,C), (2.1.2)
те віднявши від обох частин (2.1.2) відповідно IC(B)=H(B)-H(B/C) і врахувавши (2.1.1) отримаємо
IA,C (B)= IC (B)+ Ic (A, B). (2.1.3)
Із (2.1.3) випливає, що
IA,C(B)³ IC(B), (2.1.4)
тобто кількість інформації, яка міститься у векторі В про залежні вектори А і С не менше кількості інформації, яка міститься у векторі В про вектор С. При цьому в (2.1.4) має місце рівність при умові, що вектори А і В незалежні, оскільки IA,C (B)=0 і тоді H(A / C) = H( A /B, C).
На практиці часто виправдано застосування інформаційної моделі СППР при умові, що вектори А і С незалежні. Тоді аналогічно (2.1.3) отримаємо вираз.
IB,C(A)=IB(A)+IB(A,C). (2.1.5)
Із (2.1.5) при незалежності В і С витікає
IB,C (A)=IB (A) і IB (A,C)=0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.