-залежати від точностных характеристик СППР.
Усім цим вимогам задовольняють критерії, що характеризують інформаційну здатність системи.
У даній роботі для автонастройки складної системи як критерій оцінки функціональної ефективності класифікації станів використовується інформаційний критерій виду :
ЭI
= , (2.3.1)
, (2.3.1)
де H0
= - (2.3.2)
(2.3.2)
- апріорна (безумовна) ентропія;
H(g)=-
![]() ,
(2.3.3)
,
(2.3.3)
- умовна ентропія, що характеризує невизначеність ухвалення рішення, де p( ge ) – апріорна імовірність прийняття гіпотези, p(mm / ge) - апостеріорна умовна імовірність того, що має місце подія mm за умови прийняття гіпотези ge ; M - число альтернативних гіпотез.
Застосування критерію (2.3.1) для оцінки ефективності функціонування складних систем представляється природним і найбільше що повно відбиває їхню інформаційну природу.
На практиці при оцінюванні функціональної ефективності мають місце наступні реальні допущення:
-не враховуються витрати на одержання й обробку інформації;
-рішення є двухальтернативным (M=2);
-для реальної СППР апріорна інформація є неповної, тому виправдане прийняття равновероятных гіпотез: p(g 1) = p(g 2) = 0.5;
-при кожнім іспиті здійснюється однокрокова процедура ухвалення рішення.
Тоді критерій (2.3.1) приймає простий приватний вид:
ЭI
 , (2.3.4)
, (2.3.4)
Критерій (2.3.4) повною мірою задовольняє сформованим вище вимогам до КФЭ.
При двухальтернативной системі оцінок рішень, наприклад, при допусковом контролі у формі "У НОРМІ" - "НЕ В НОРМІ" як основну гіпотезу приймемо гіпотезу про перебування обмірюваного значення контрольованого параметра в поле допусків і як альтернативну гіпотезу - гіпотезу про перебування обмірюваного значення параметра не в поле допусків. При цьому, мають місце чотири можливих результати процесу контролю, що характеризуються наступними імовірностями - точностными характеристиками:
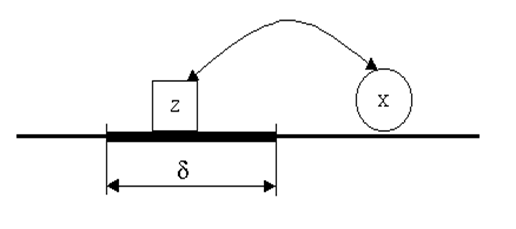
- помилка першого роду (Малюнок 2.3.1а); умовна імовірність того, що измерянное значення лежить поза полючи допуску за умови, що щире значення належить полю допуску:
a = p( xÎ d / z Îd ); (2.3.5)
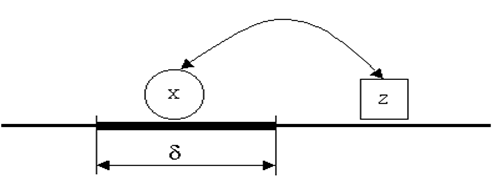
- помилка другого роду (Малюнок 2.3.1б); умовна імовірність того, що измерянное значення лежить у поле допуску за умови, що щире значення не належить полю допуску:
b = p( xÎ d / z Îd ); (2.3.6)
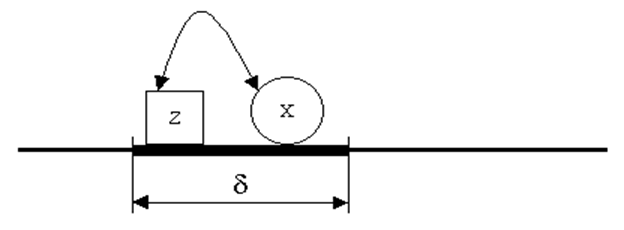
- перша вірогідність (Малюнок 2.3.1в); умовна імовірність того, що измерянное значення лежить у поле допуску за умови, що щире значення також належить полю допуску:
D1 = p( xÎ d / z Îd ); (2.3.7)
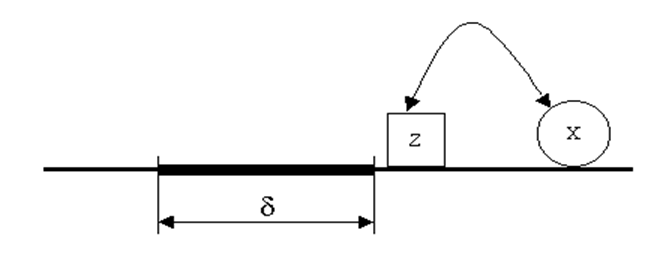
- і друга вірогідність (Малюнок 2.3.1г); умовна імовірність того, що измерянное значення лежить поза полючи допуску за умови, що щире значення також не належить полю допуску:
D2 = p( xÎ d / z Îd ); (2.3.8)
де x і z - відповідно обмірюване і щире значення параметра;
d - поле допуску на значення параметра.
|
|
б) помилка другого роду
|
|
г) друга вірогідність
Малюнок 2.3.1 – Можливі исходы при двухальтернативном рішенні.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.