3) вскрытие т/п (одноковшовым экскаватором, роторным вскрышным экскаватором (ЭВРТ), машиной для вскрытия т/п (МВТ));
4)
 |
5) проверка тех. состояния сварных швов (визуально или с помощью физических методов контроля);
6) подъем т/п (одним или несколькими трубоукладчиками);
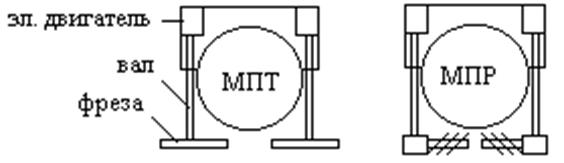
7) снятие старой изоляции – механический способ (срезание (цепи, резцы, мет. щетки, фрезы, тросы) , динамическое воздействие (пескоструйный и дробеструйный метод), гидравлический метод;
8) восстановление стенки трубы (риски, царапины – шлифовка, язвы – заплавка, гофры и язвы большой глубины – наложение приварных муфт или композитная муфтовая технология);
9) окончательная очистка;
10) нанесение изоляции и ее контроль;
11) подсыпка грунта под т/п и трамбовка;
12) укладка т/п;
13) засыпка т/п;
14) рекультивация грунта.
Подготовительные работы при капитальном ремонте.
- определение положения трубопровода (специальными трассоискателями или шурфованием);
- планировка полосы проложенного т/п
Определение положения т/п:
Правильное определение положения трубопровода перед началом земляных работ позволяет свести их объем к минимуму и обеспечить сохранность тела трубы при работе экскаватора. Определение местоположения трубопровода необходимо и при контроле целостности изоляционного покрытия.
Для этой цели широко применяются различные приборы, в том числе и трассоискатель ИТ-5.
Результаты измерений глубины заложения трубопровода наносят на колышки, забиваемые строго по оси трубопровода через 50 м, а на участках с малой глубиной залегания и сильно пересеченным микрорельефом - через 25м.
Принцип действия искателя основан на использовании электромагнитной индукции: импульсно-модулированный сигнал, формируемый генератором, при помощи выходного шнура подводится к трубопроводу. При этом вокруг оси трубопровода появляется переменное магнитное поле, которое возбуждает в антенне приемника электродвижущую силу. Ток усиливается приемником и поступает в головные телефоны. Таким образом, искатель выполняет функции индикатора при определении индукционным методом местоположения подземных металлических трубопроводов (а так же энергосиловых кабелей), расположенных на глубине до 10 м, на расстоянии до 1,5 км от точки подключения генератора. Погрешность определения планово-высотного положения ±20 см.
Искатель может работать и без подключения генератора при условии норм. работы системы ЭХЗ.
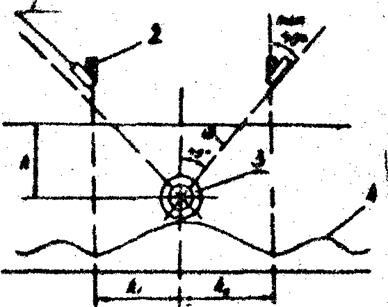 |
Рис.1.1. Схема определения местоположения трубопровода по максимуму сигнала:
1 - штанга; 2 – антенна; 3 – трубопровод; 4 - кривая уровня слышимости сигнала.
Максимум сигнала будет соответствовать положению антенны точно над осью трубопровода. Уточнить положение трубопровода можно по минимуму сигнала. Для этого антенна располагается вертикально и перемещается по горизонтали перпендикулярно к направлению трубопровода. Минимум сигнала будет соответствовать положению антенны над осью трубопровода.
Для определения направления трассы антенну устанавливают в горизонтальной плоскости над осью трубопровода и вращают штангу вокруг вертикальной оси. Направление антенны при минимальном значении звукового сигнала будет указывать направление оси трубопровода.
Определение глубины заложения подземных трубопроводов выполняют после установления точного положения его оси. В этом случае антенну располагают под углом 450 к поверхности земли, устанавливают над осью трубопровода и перемещают в горизонтальном направлении, перпендикулярном оси трубопровода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.