Если требуется глубокое регулирование частоты вращения двигатели, применяют ДПР типа бесконтактного сельсина. Такой ДПР содержит на статоре первичную распределенную трехфазную обмотку, питаемую током повышенной частоты (5 - 1О кГц) и выходную обмотку катушечного типа. К обеим обмоткам примыкает стальной осесимметричный магнитопровод. Ротор ДПР содержит несимметричный стальной сердечник, отделенный рабочим зазором от магнитопровода статора и первичной обмотки.
Датчики, фиксирующие положение амплитуды полного магнитнитного потока двигателя, могут либо реализовываться на базе датчиков Холла, либо реагировать. на насыщение магнитной цепи. Одна из возможных конструкций индукционного датчика с насыщающейся цепью содержит магнитопровод с двумя катушками первичной, питаемой однополярными импульсами тока, и вторичной, подключенной к системе управления инвертора. Магнитопровод датчика сопрягается с основным магнитопроводом статора. При прохождении мимо датчика максимального полного потока магнитопровод датчика насыщается, что приводит к изменению импульсов, наводимых но вторичной обмотке. Эти изменения фиксируются системой управления, посылающей сигналы на управляющие электроды тиристоров.
Для БДПТ малой мощности оба рассмотренных типа датчика идентичны, так как они фиксируют положение оси dиндукторе. В относительно мощных двигателях с заметной реакцией якоря амплитуда полного потока сдвигается по отношению к оси d. Индуктора и фиксируемый параметр у рассмотренных датчиков будет разный: у датчика первого типа — положение ротора; у датчиков второго типа — положение полного потока.
Кроме описанных датчиков в БДПТ используются датчики нагрузки, сигнал которых пропорционален току якоря. Измеряемыми параметрами
могут быть также углы коммутации у и запаса ![]() , Угол y фиксируется с помощью трансформаторов тока в фазах двигателя, реагирующих на изменения тока в течение периода коммутации. Угол
, Угол y фиксируется с помощью трансформаторов тока в фазах двигателя, реагирующих на изменения тока в течение периода коммутации. Угол ![]() измеряют
устройством, фиксирующим угол между моментом окончания коммутации и моментом
перехода через нуль ЭДС в коммутирующем контуре.
измеряют
устройством, фиксирующим угол между моментом окончания коммутации и моментом
перехода через нуль ЭДС в коммутирующем контуре.
Конструкция собственно двигателя реализуется на базе любой из описанных ранее конструкций бесконтактных машин переменного тока. В маломощных БДПТ, а также в некоторых типах БДПТ с мощностями до нескольких киловатт и даже десятков киловатт могут использоваться различные варианты конструктивного исполнения бесконтактных машин с постоянными магнитами. Особенно перспективным представляется применение в БДПТ индукторов с высокоэнергетическими редкоземельными постоянными магнитами. Недостаток таких БДПТ — высокая стоимость и невозможность регулирования потока возбуждения.
БДПТ с постоянными магнитами широко используются в маломощных приводах, системах звукозаписи, медицинской аппаратуре и т. п. Ведутся разработки таких БДПТ мощностью 10— 20 кВт для электромобилей, электроприводов летательных аппаратов и т. п. Такие БДПТ применяют в качестве тяговых двигателей электровозов, приводных двигателей мощных автосамосвалов и автопоездов. При мощностях 200—300 кВт и частотах вращения на уровне 1000 об/мин их удельная масса составляет 6—8 кг/кВт. БДПТ средней мощности могут выполняться на основе синхронных двигателей с когтеобразными полюсами. Хорошие перспективы для реализации транспортных БДПТ имеют индукторные двигатели, особенно двигатель с двойным аксиальным зазором . Удельные массы БДПТ заметно превышают удельные массы используемых в них базисных двигателей переменного тока из-за наличия инвертора и системы управления. При мощностях 10—100 кВт удельные массы (с учетом инвертора) имеют порядок 3—4 кг/кВт. В целом можно считать, что БДПТ является одним из наиболее перспективных типов электрических двигателей, которые внедряются в самые разнообразные области техники быстро нарастающими темпами. Особенно перспективны БДПТ для автономных энергоустановок с первичным источником электроэнергии постоянного тока, работающих в сложных окружающих условиях (например, для установок с солнечными батареями или топливными элементами, электромобилей с высокоэнергетическими аккумуляторами и т. п.). Для улучшения массогабаритных и энергетических показателей БДПТ и автономных энергоустановок в целом рационально использовать в них повышенное напряжение постоянного тока (250—400 В).
|
|
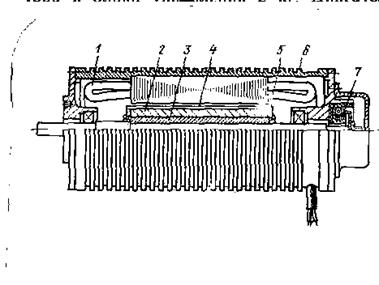
Вид А (крышка снята}

Рисунок 46 -. Конструкция БДПТ мощностью 500 В
Двигатель содержит на статоре якорь с трехфазной обмоткой, питаемой от инвертора, и четырехполюсный индуктор на роторе, состоящий из призматических радиально намагниченных магнитов 2 из материала КС-37 А . Магниты приклеены к магнитомягкой втулке 3 и стянуты снаружи тонкостенной немагнитной обечайкой 4. На торцах индуктора размещаются латунные шайбы 5. Корпус двигателя 6 оребрен для лучшего теплоотвода. На боковом щите расположен блок ДПР 7 типа бесконтактного торцового сельсина. Питание двигателя осуществляется от тиристорно-транзисторного инверторам.
Использование БДПТ повышенного напряжения с магнитами на основе редкоземельных материалов позволяет заменить в самолетных энергосистемах гидро- и пневмо-приводы на электроприводы, обладающие меньшей массой и повышенной надежностью. Создание таких полностью электрифицированных летательных аппаратов является одной из важных проблем авиационной электроэнергетики.
Список используемой литературы
1. Бут Д.А. Бесконтактные электрические машины : Учеб. пособие для электромеханических и электроэнергетических спец. втузов . М.:Высш. шк.,1985 –255 с.,ил.
2. Балагуров В.А., Галтеев Ф.Ф., Ларионов А.Н., Электрические машины с постоянными магнитами. - М.:Энергия, 1964.
3. Поспелов Л.И. Конструкции авиационнных электрических машин. Энергоиздат, 1982 г
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.