Бесконтактный двигатель постоянноro тока (БДПТ) является объединением полупроводникового инвертора и бесконтактного двигателя переменного тока с обмоткой якоря на статоре и магнитными полюсами на роторе. БДПТ принадлежит к классу вентильных двигателей, у которых коммутация тока в якорной обмотке осуществляется с помощью полупроводникового коммутатора. Помимо БДПТ к вентильным относятся двигатели постоянного и переменного тока (репульсионные) с обмотками на роторе, питаемыми через щеточный контакт.
Рассмотрим работу БДПТ, в котором двигательная часть содержит двухполюсный ротор и трехфазный якорь с катушками АА', ВВ', СС', а в качестве инвертора используется инвертор тока, обеспечивающий, как известно, неизменное значение первичного тока Idблагодаря индуктивности. Управление инвертором в наиболее простом варианте осуществляется системой управления СУ с помощью бесконтактных датчиков положения ротора ДПР. Помимо ДПР в БДПТ могут использоваться датчики, фиксирующие положение амплитуды полного магнитного потока, длительность периода коммутации вентилей (угла у) и др., а также датчики, сигналы которых пропорциональны напряжению и току двигателя (датчики нагрузки).
Форму кривой ЭДС вращения в первом приближении можно считать синусоидальной. ЭДС вращения, подобно ЭДС коллекторных и синхронных двигателей, стремится
скомпенсировать
приложенное к якорю напряжение. Ясно, что чем больше, подводимое к двигателю
напряжение, тем больше должна быть компенсирующая его ЭДС, а следовательно, и
частота вращения ротора. Таким образом, один из способов регулирования частоты вращения
п двигателя связан с изменением
напряжения питания. Другой способ регулироваия п основан
на изменении значения Фв (например, с помощью тока возбуждения, если в БДПТ имеются обмотки возбуждения).
Если уменьшать Фа,сохраняя
неизменным напряжение питания, то, для
поддержания требуемой ЭДС вращения двигатель ускорится до больших значений
п. Третьим способом регулирования п.
является изменение угла
опережения включения катушек на
статоре по отношению к положению ротора.Таким образом, в
БДПТ имеется вращающаяся МДС якоря и, ротор с магнитными полюсами, вращающийся
с той же (синхронной) скоростью, что и МДС якоря, и индуцирующий в якоре
синусоидальную ЭДС вращения.
|
|
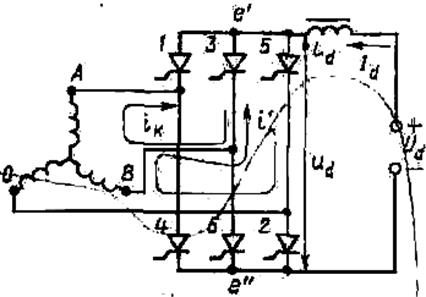
Рисунок 43 – Трехфазный мостовой инвертор с машинной коммутацией
Инвертирование тока в БДПТ осуществляется с помощью известных инверторных схем, особенности работы которых определяются типом полупроводниковых элементов. В БДПТ малой мощности инвертор содержит транзисторы, работающие и ключевом режиме, которые включаются и отключаются от ДПР в нужные моменты времени. Их включение обеспечивается сигналами, зависящими от положения ротора, а отключение требует создания паузы рабочего тока Наиболее рациональный способ отключения тиристоров в БДПТ обеспечивается в схемах с естественной коммутацией (называемой также машинной коммутацией)
Суть последней заключается в использовании ЭДС вращения, наводимой в якорных обмотках, для создания паузы тока в тиристорах. В тиристорных инверторах БДПТ может использоваться и искусственная коммутация, при которой пауза тока в тиристорах создается с помощью специальной электрической схемы.
Хотя использование машинной коммутации тиристоров под действием наводимой в обмотках ЭДС является простым и удобным, оно невозможно при пуске БДПТ, когда ЭДС в обмотках не наводится. Поэтому для обеспечения пуска БДПТ с машинной коммутацией необходимы специальные меры, например, асинхронный пуск, пуск с временным переводом тиристоров в режим искусственной коммутации и др., что усложняет конструкцию и схему БДПТ
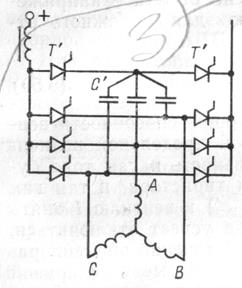
Рисунок 44 – БДПТ с искуственной коммутацией тиристоров
Как отмечалось выше, возможна постоянная работа БДПТ с искусственной коммутацией тиристоров, обеспечиваемой, например, с помощью коммутирующих конденсаторов. Одна из схем такого БДПТ приведена на Рисунке 37. Параллельно с фазными обмотками А, В, С включена батарея конденсаторов С', нулевая точка которой через вспомогательные тиристоры Т' соединена с катодной и анодной точками инвертора. В межкоммутационные интервалы батарея заряжается так, что ее фазные зажимы приобретают потенциалы соответствующих /фазных обмоток. В нужный момент времени включается один из тиристоров Т' и образуется коммутационный контур, через который соответствующий конденсатор разряжается, создавая обратный ток в отключаемом главном тиристоре и прямой ток во включаемом главном тиристоре. Для повышения надежности работы коммутирующих конденсаторов они могут заряжаться от специального вспомогательного источника. В схемах БДПТ с искусственной коммутацией проблема запуска не возникает.
2.2 Особенности конструктивного исполнения и области применения БДПТ.
Специфическим элементом БДПТ является блок датчиков, фиксирующих положение ротора (ДПР) или магнитного потока. Существует большое многообразие ДПР. В относительно мощных двигателях наибольшее распространение получили индукционные ДПР.
|
|
|
|
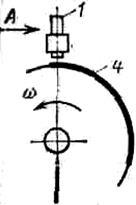
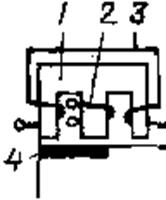
Рисунок 45 – Индукционный датчик положения ротора
Одна. из возможных конструкций такого ДПР представлена на Рисунке 38, ДПР состоит из закрепленного на статоре шихтованного Т-образного сердечника с первичной 2 и вторичной 3 обмотками. На роторе размещаются магнитомягкие накладки 4, которые при определенном угле поворота ротора примыкают через зазор к среднему и одному крайнему выступам сердечника /. Обмотка 2 на среднем выступе питается от генератора высокой частоты (более 1,5—2 кГц). Когда под сердечником накладки 4 нет, сигнал в выходной обмотке 3 отсутствует благодаря симметрии магнитной системы. Если накладка 4 располагается под сердечником /, то симметрия магнитной системы нарушается и в обмотке 3 появляется высокочастотный трансформаторный сигнал, который поступает на усилитель и преобразуется в прямоугольные импульсы, подаваемые на управляющие электроды соответствуюших тиристоров инвертора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.