2.2.5.6.3 Съем крышек и панелей составных частей ПР должен быть достаточно простым. Крышки и панели должны обеспечиваться невыпадающим крепежом.
2.2.5.7 Требования к патентной чистоте.
2.2.5.7.1 ПР должен обладать патентной чистотой в отношении РФ, стран возможной экспортной поставки, стран, занимающих ведущее место в робототехнике.
2.2.5.8 Требования к составным частям ПР, сырью, исходным и эксплуатационным материалам.
2.2.5.8.1 Выбор дефицитных комплектующих изделий и материалов должен быть подтвержден обоснованием.
2.2.5.8.2 Все металлические части манипулятора, за исключением выполненных из коррозийно-стойких материалов, должны быть защищены от коррозии.
2.2.5.9 Условия эксплуатации, требования к техническому обслуживанию и ремонту.
2.2.5.9.1 Питание системы управления должно осуществляться от сети переменного тока напряжением 380 В, частотой 50 Гц.
2.2.5.10 Требования к категории качества.
2.2.5.10.1 Разрабатываемое изделие должно быть 1 категории качества.
2.2.6 Стадии и этапы разработки
2.2.6.1 Разработка конструкторской документации на ПР предусматривает следующие стадии, этапы работ и срок их выполнения:
эскизный проект 4 кв. 2011 г.
технический проект 4 кв. 2011 г.
разработка рабочей конструкторской документации 4 кв. 2011 г.
разработка документации опытного образца 4 кв. 2011 г.
2.3 Заключение
В ходе патентного исследования были учтены все элементы модернизируемой части промышленного робота.. Все дальнейшие расчеты будут вестись с учетом данного исследования и технического задания. В самом техническом задании оговорены все ключевые пункты по частичной модернизации, касающиеся данного проекта, все не нужные части были удалены, т.к. в них нет необходимости при дальнейших расчетах модернизируемого узла.
3 КОНСТРУКТИВНАЯ ЧАСТЬ
3.1 Описание конструкции модернизируемого промышленного робота
Робот РГШ - 40 (рисунок 13):
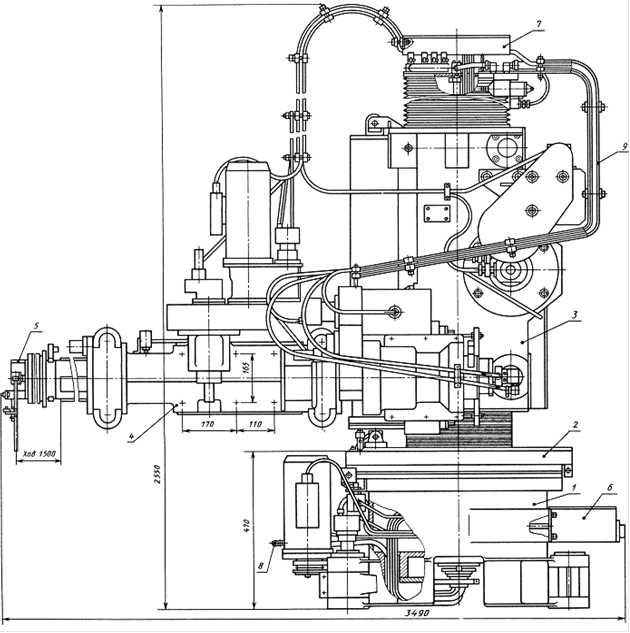
Рисунок 13. Общий вид робота РГШ-40
Технические характеристики РГШ-40 приведены в таблице 2.
Таблица 2
|
Грузоподъёмность, кг |
40 |
|
Степеней подвижности манипулятора |
4 |
|
Погрешность позиционирования схвата, мм |
± 2 |
|
Усилие схвата, Н |
6000 |
|
Общая мощность электродвигателей приводов, кВт |
7 |
|
Масса (без устройства укрепления), кг |
1200 |
|
Диапазоны перемещений: · Поворот в горизонтальной плоскости, град · подъём руки, мм · выдвижение кисти · поворот кисти, относительно продольной оси, град |
· 340 · 800 · 1500 · 90 |
|
Скорости перемещений: · поворота руки, град/с · подъём руки, м/с · выдвижение кисти, м/с · вращение кисти, м/с |
· 150 · 0,6 · 1,0 · 90 |
3.2. Кинематический расчёт
Исходные данные:
Скорость выдвижения манипулятора – Vм = 1,0 м/с;
Время разгона руки манипулятора – tр = 1 с;
Масса выдвигающейся части руки – mруки = 200 кг;
Масса груза – mг = 27 кг;
Ход руки манипулятора – S = 1400 мм.
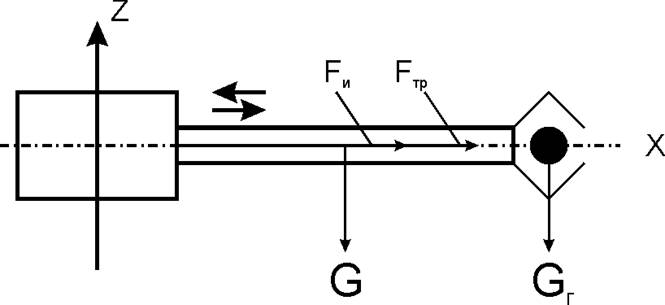
Рисунок 14. Расчётная схема.
На расчетной схеме (рис. 14) изображены силы, действующие на руку. При движении руки на нее действуют две результирующие силы, препятствующие ее движению: осевая сила Fa и радиальная сила Fr . Всю радиальную силу будет забирать втулка, на которую опирается выходящий вал. Винтовая передача обеспечивает только осевое выдвижение.
Осевую силу Fa , Н, вычислим по формуле:
![]() , (3.1)
, (3.1)
где ![]() –
сила инерции, Н;
–
сила инерции, Н;
![]() –
сила трения, Н.
–
сила трения, Н.
Силу инерции ![]() ,
Н, вычислим по формуле:
,
Н, вычислим по формуле:
![]() , (3.2)
, (3.2)
где ![]() –
инерционное ускорение, м/с2;
–
инерционное ускорение, м/с2;
![]() – масса руки манипулятора, кг,
m = 100;
– масса руки манипулятора, кг,
m = 100;
![]() – масса груза, кг,
– масса груза, кг, ![]() =
27;
=
27;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.