Основное преимущество ПР – возможность быстрой переналадки для выполнения задач, различающихся последовательностью и характером манипуляционных действий, поэтому их применение наиболее эффективно в условиях частой смены объектов производства, а также для автоматизации ручного низко квалифицированного труда.
Основные предпосылки расширения применения ПР:
1) повышение качества продукции и объёмов её выпуска благодаря снижению времени выполнения операций и обеспечению постоянного режима «без усталости», росту коэффициента сменности работы оборудования, интенсификации существующих и стимулированию создания новых высокоскоростных процессов и оборудования;
2) изменение условий труда работающих путём улучшения условий безопасности, снижения потерь рабочего времени от производственного травматизма и профессионально – технических заболеваний;
3) экономия и высвобождение рабочей силы для решения народнохозяйственных задач.
ОСНОВНАЯ ЧАСТЬ
1 Выбор компоновки промышленного робота по условиям точности и быстродействия
1.1 Наш роботизированный технологический комплекс должен удовлетворять условиям точности позиционирования захватного устройства и быстродействия промышленного робота (ПР). Для этого мы должны сначала выбрать компоновку промышленного робота.
Координаты точек, в которые требуется попадание точек захватного устройства манипулятора расположены в достаточно большом диапазоне и указаны на рисунке 1.
- координата х в пределах от -2,4 м до 2,0 м (диапазон 4,4 м)
- координата y в пределах от -2,0 м до 1,8 м (диапазон 3,8 м)
- координата z в пределах от 1,1 м до 1,4 м (диапазон 0,3 м)
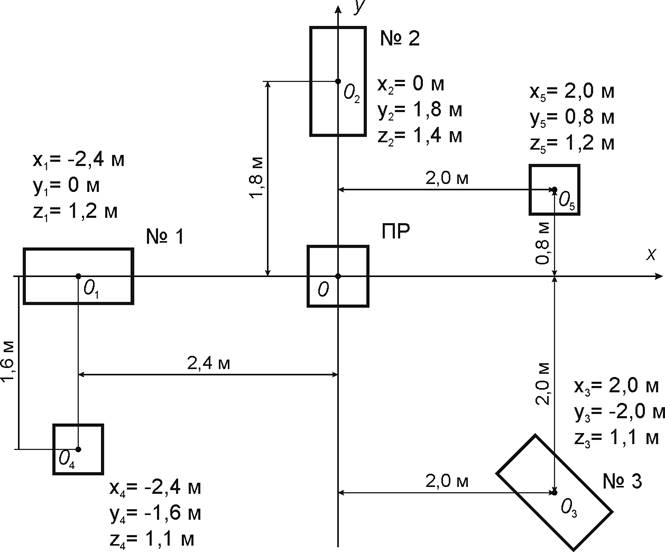
Рисунок 1 – Расстояния между технологическим оборудованием
и промышленным роботом.
1.2 Возможные компоновки
Мы имеем четыре возможных варианта робота для данной схемы:
а) Полярная цилиндрическая система координат и робот, работающий в ней изображены на рисунке 2.
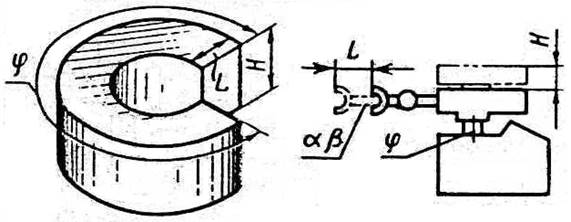
Рисунок 2 – полярная цилиндрическая система координат.
б) декартова пространственная система координат и робот, работающий в такой системе координат изображены на рисунке 4;
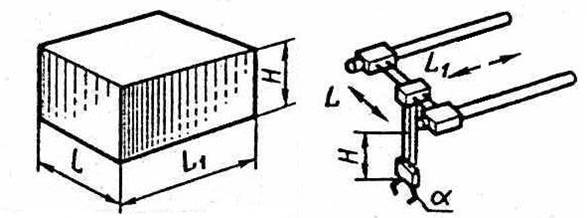
Рисунок 3 – Декартова пространственная система координат в) полярная сферическая система координат и робот, работающий в такой системе изображены на рисунке 4;
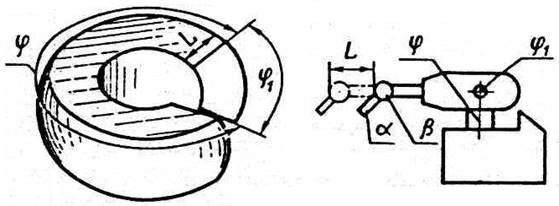
Рисунок 4 – полярная сферическая система координат г) ангулярная система координат и робот, работающий в такой системе изображены на рисунке 5.
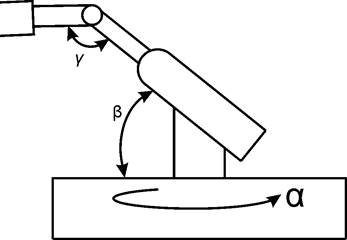
Рисунок 5 – ангулярная система координат
Для всех четырёх компоновок зададимся определенными равными условиями и формулами для расчета быстродействия и точности позиционирования.
Исходные данные:
- коэффициент качества измерений цепей системы![]() =
1,5 (для цифровых систем управления);
=
1,5 (для цифровых систем управления);
- разрешающая способность датчиков без накопления
погрешности для транспортных степеней подвижности ![]() =5000
дискрет/м;
=5000
дискрет/м;
- разрешающая способность датчиков без накопления
погрешности для ориентирующих степеней подвижности ![]() =100
дискрет/град;
=100
дискрет/град;
- скорость линейных перемещений ![]() =0,5
м/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);
=0,5
м/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);
- скорость углового перемещения робота вокруг
вертикальной оси ![]() =25
град/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);
=25
град/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);
- скорость угловых перемещений ![]() =45
град/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);.
=45
град/с (средняя скорость ПР требуемого класса с учетом разгона и торможения);.
- высота перемещений манипулятора между оборудованием 300 мм;
- линейные перемещения ![]() ,
мм берутся из рисунков, описывающих движения ПР;
,
мм берутся из рисунков, описывающих движения ПР;
- угловые перемещения ![]() ,
град берутся из рисунков, описывающих движения ПР.
,
град берутся из рисунков, описывающих движения ПР.
1.2.1 Расчет для точности позиционирования промышленного робота (полярная цилиндрическая система координат).
Схема траектории движения манипулятора промышленного робота изображена на рисунке 7.
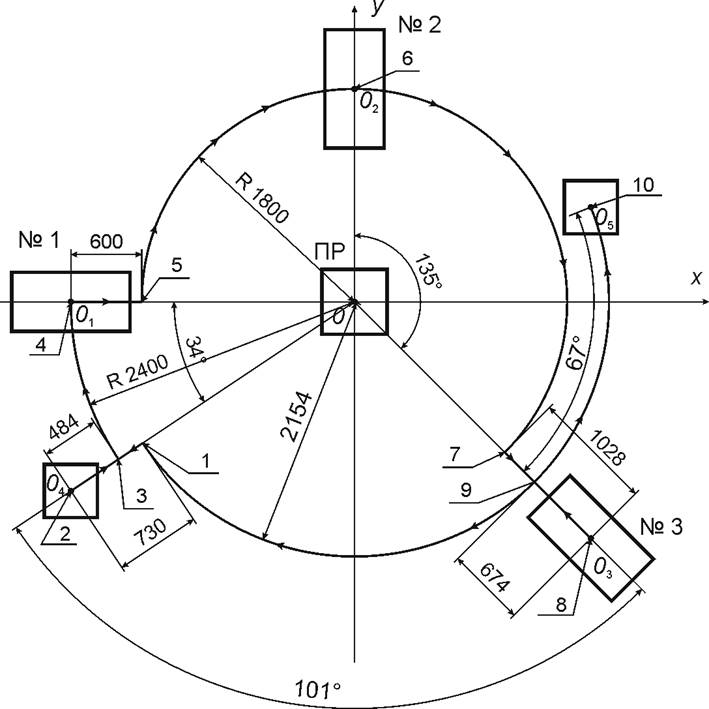
Рисунок 6 – Движения промышленного робота в полярной
цилиндрической системе координат
1.2.1.1 Описание траектории движения манипулятора
Схема движения манипулятора показана на рисунке 6.
Примем за нулевое положение схвата точку 1 с координатами:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.