Использование: в приводах задвижек, машин и механизмов. Сущность изобретения: обгонный канал выполнен в виде изогнутой трубки, установленной в гнезде сверления гайки. Трубка выполнена в виде двух одинаковых половин, оппозитно установленных и соединенных друг с другом вдоль оси трубки. Наружный диаметр трубки равен наружному диаметру гайки. Средство крепления трубки к гайке выполнено в виде втулки, охватывающей наружную поверхность гайки.
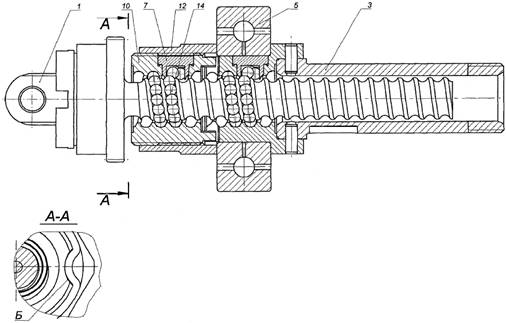
Рисунок 12 - Общий вид шарико - винтовой передачи заявки: 2010123038/11
2.2 Техническое задание
2.2.1 Наименование и область применения
2.2.1.1 ПР допускает (при соответствующем оснащении) применение его на операциях снятия заготовок и деталей, смены инструментов и других вспомогательных операциях при обслуживании станков с ЧПУ.
2.2.2 Обоснование для разработки
2.2.2.1 Разработка промышленного робота производится в соответствии с заданием на курсовое проектирование, указанными в нем данными и необходимыми условиями, выданным преподавателем.
2.2.3 Цель и назначение разработки
2.2.3.1 Функциональное назначение ПР состоит в осуществлении операций перемещения объектов производства(рабочего инструмента), установки их в рабочие позиции.
2.2.4 Источники разработки
2.2.4.1 Разработка ведется:
патентно-информационных исследований;
изучения работы по технологическому обслуживанию и эксплуатации ПР модели РГШ - 40, установленного на машиностроительном предприятии;
2.2.5 Технические требования
2.2.5.1 Состав ПР и требования к конструктивному исполнению.
2.2.5.1.1 В ПР должны входить следующие составные части: манипулятор; устройство управления; кабели связи устройства управления с манипулятором.
2.2.5.2 Показатели назначения и экономного использования сырья, материалов, топлива, энергии.
2.2.5.2.1 Номинальная грузоподъемность, кг 27
2.2.5.2.2 Максимальная абсолютная погрешность позиционирования, мм
±2 мм
2.2.5.2.3 Геометрические характеристики рабочей зоны: сложная цилиндрическая полярная
2.2.5.2.4 Показатели назначения степени подвижности.
2.2.5.2.4.1 Показатели степени подвижности (ее наименование):
максимальное перемещение, мм (°):
- вылет руки, 1400 мм
- подъём руки, 300 мм
- поворота вокруг вертикальной оси, 270 град;
максимальная скорость, мм/с (°/с):
- вылета руки, 1000 мм/с
- поворота руки вокруг вертикальной оси, 100 °/с максимальная абсолютная погрешность позиционирования ±2 мм
2.2.5.2.5 Производительность ПР при выполнении операций, не ниже, не менее 70 деталей в смену
2.2.5.2.6 Время разгона до номинальной скорости, с, не менее 1,0
2.2.5.2.7 Диапазон регулирования скорости:
по вертикальной оси..….………………….……………..0,005 – 0,05 м/с по горизонтальной оси..….……………………………..0,008 – 1,0 м/с
2.2.5.3 Требования к надежности.
2.2.5.3.1 Все узлы и механизмы ПР должны работать без заеданий и ударов.
2.2.5.3.2 В наиболее ответственных местах должны быть предусмотрены предохранительные устройства от механических перегрузок.
2.2.5.4 Требования к технологичности и метрологическому обеспечению разработки, производства и эксплуатации.
2.2.5.4.1 Конструкция ПР должна быть технологичной при изготовлении, эксплуатации и ремонте.
2.2.5.4.2 Сборка и стыковка отдельных частей ПР не должны требовать сложного технологического оснащения.
2.2.5.5 Требования безопасности.
2.2.5.5.1 В системе управления ПР должны быть предусмотрены блокировки, для случая сбоя программ, обеспечивающие аварийный останов исполнительного органа манипулятора.
2.2.5.5.2 Конструкция манипулятора должна исключать его поломку при встрече с препятствием в случае сбоя программы и иметь блокировки для отключения приводов.
2.2.5.6 Эстетические и эргономические требования.
2.2.5.6.1 Конструкция составных частей ПР и их внешний вид должны соответствовать современным требованиям технической эстетики.
2.2.5.6.2 Места регулирования, точки смазки манипулятора должны находиться в доступных местах и не требовать его разборки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.