Для выбора редуктора определяем частоту вращения ходовых колес:
 (3.17)
(3.17)
Необходимое передаточное число механизма:
 (3.18)
(3.18)
По [2, табл. III.4.16] выбираем цилиндрический вертикальный трехступенчатый крановый редуктор типа ВК-475 с передаточным числом 103,61, частотой вращения быстроходного вала до 1000 об/мин.
Фактическое число оборотов ходовых колес:
 (3.19)
(3.19)
Фактическая скорость тележки:
![]() (3.20)
(3.20)
Отклонение от заданной скорости:
 (3.21)
(3.21)
Допускается отклонение фактической скорости от заданной на 10%. В нашем случае мы получили допустимое отклонение.
Окончательная кинематическая схема остается неизменной и приведена на рис. 3.1. Принимаем КПД муфт ηм равный 0,99; КПД редуктора 0,96; КПД подшипника ηп 0,98, КПД открытой пары ηоп 0,95. Тогда фактический КПД механизма с учетом принятой кинематической схемы рис. 3.1 равен:
![]() (3.22)
(3.22)
Коэффициент механизма передвижения Км1 = 1,5. Коэффициент запаса, зависящий от режима работы Км2 = 1,1. Зубчатую муфту между электродвигателем и редуктором выбираем по расчетному моменту:
 (3.23)
(3.23)
Выбираем муфту фланцевую стальную по ГОСТ 20761-80 с номинальным крутящим моментом 250 Н∙м. D = 0,14 м, M = 6,3 кг. Момент инерции муфты тормозного шкива 0,012 кг∙м2.
Принимаем коэффициент сцепления ходовых колес с рельсом φ = 0,2. Уклон рельсовых путей ψ = 0,003. Коэффициент трения реборд колес о рельсы Кр = 1.
Максимально допустимое замедление при отсутствии проскальзывания заторможенных колес при работе крана без груза:

Время торможения:
 (3.24)
(3.24)
Сила статического сопротивления передвижению тележки без груза при торможении:

Момент сопротивления на приводном валу (первому):
 (3.25)
(3.25)
Найдем динамический момент торможения, приведенный к первому валу:
 (3.26)
(3.26)
Определяем необходимый тормозной момент:
![]() (3.27)
(3.27)
Выбираем колодочный электромагнитный тормоз ТКТ-200 с наибольшим тормозным моментом 160 Н∙м.
Статическое сопротивление передвижению нагруженной тележки при торможении:
 (3.28)
(3.28)
Момент сопротивления на первом валу:
 (3.29)
(3.29)
Динамический момент при торможении нагруженной тележки:
![]() (3.30)
(3.30)
Время торможения тележки крана с грузом:
 (3.31)
(3.31)
Полученное время меньше наибольшего времени затормаживания выбранного тормоза (2 с), поэтому делаем вывод, что условия работы будут нормальными.
Для механизма передвижения моста, при пролётах более 15 м, применяется раздельный привод. В раздельном приводе для каждого приводного колеса или группы приводных колёс имеется индивидуальный привод. Кинематическая схема приведена на рис. 4.1. Краны малой грузоподъёмности до 50 т, устанавливаются на четыре ходовых колеса, для кранов грузоподъёмностью 75 – 125 т мост имеет восемь ходовых колёс, а при грузоподъёмности 150 т и более – 16 ходовых колёс. Для обеспечения равномерного распределения нагрузки между колёсами следует установить уравновешивающие балансиры.
При работе с раздельным приводом опоры моста крана нагружаются неравномерно. Для выбора двигателя необходимо найти реакцию максимально нагруженной опоры, определить максимальную нагрузку на одно колесо и подобрать для заданных параметров механизма крановое колесо, далее определить сопротивление передвижению наиболее нагруженной опоры и найти мощность электродвигателя.
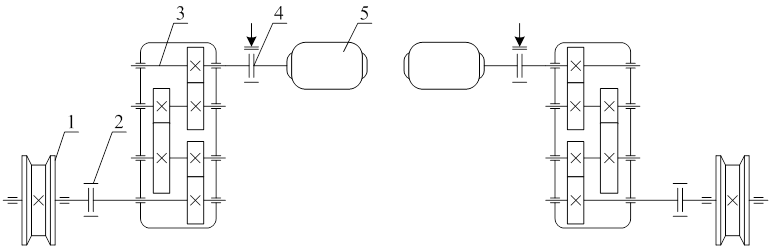
Рис. 4.1 Кинематическая схема механизма передвижения моста с раздельным приводом
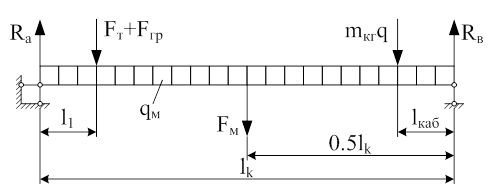
Рис. 4.2 Схема для расчета механизма передвижения мостового крана с раздельным приводом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.